自动驾驶愈热,围绕城市NOA(城市高阶辅助驾驶系统)的市场抢位战愈发内卷。
2023年以前,NOA主要应用在高速场景,也称高速领航辅助,可实现主动变道、自动上下匝道、加塞处理、自动速度调节等动作,目前头部的新势力等车企已经基本完成了高速NOA的落地。
想要实现更高阶的自动驾驶,不可能一直停留在高速及城市快速路的阶段。今年部分业内领先车企将陆续推出城区NOA。
当NOA“进城”,业界对于“重感知、轻地图”的争论与误解愈发凸显,而关于高精地图也逐渐呈现出多种解决思路。这源于产业对高精地图的认知——“目前它具备精度高、量产快、安全性高等能力,但同时也面临着覆盖城市少、单价高、更新速度慢等问题。”
正因如此,国内的高精地图服务商们开始尝试以更加专业的视角阐释“轻地图”的详细路径,通过在数据技术积累的优势为产业提供更为优化的方案。
近期,全道科技在第十二届全球地理信息开发者大会(WGDC 2023)上发布了“轻地图闭环解决方案”,首次将“轻地图”以“可视化”的方式展现给业界,全道科技同时也成为了首家将“轻地图数据闭环”进行量产落地实践的公司。
高速到城市,高精地图不得不“轻”
“倘若将依赖高精地图的高速NOA反过来平推至城市NOA,这一路径大概率是走不通的。”全道科技执行董事王闯坦言。
落到实际量产应用环节,尤其是面向城市NOA量产过程中,由于城市各种建筑物的遮挡,导致实时定位RTK往往无法很好收敛与固定,NOA过程中很难实时获取准确的自车绝对精度定位,也就不能仅靠绝对精度跟地图进行匹配。
那,城市NOA能不能没有高精地图?
事实上,目前真正能称得上不依赖高精地图的自动驾驶功能仅有特斯拉实现过。

全道科技重申了高精地图的重要性,王闯提到,“中国城市的道路样本复杂度独一无二,感知可有效覆盖看得见的路中行驶、简单路口等城市简单场景。而高精地图因具备超视距、沉淀历史感知成果与经验、提升自动驾驶体验与安全等能力,在应对城市中看不见或看不清的复杂与极端场景时,将发挥更大价值。只有将二者能力进行有效互补,才有助于提升城市NOA整体驾驶体验与安全性。”
当高精地图的限制使其难以复制自身在高速NOA得以大规模应用的经验,行业的拷问愈发清晰:究竟适合城市NOA的发展模式是什么?
基于以上前提,部分造车新势力选择了“重感知、轻地图”路线。小鹏、蔚来、理想等造车新势力,以及华为、地平线、毫末智行等智能驾驶解决方案商已相继宣布,未来将采用以车辆自身传感器为主、高精地图为辅的路线发展自动驾驶。
另有部分企业宣称未来将无需高精地图,仅需直接接入导航地图(标准SD 地图)即可。比如参考特斯拉FSD,其在数据标注阶段使用的是高精度地图,而在FSD实际运营阶段则是接入的普通导航地图。
全道科技则更愿意用“轻量级”地图的说法来诠释“轻地图”的概念。实际上,高精地图在自动驾驶中属于先验数据,“轻地图”不意味着“轻视”地图。作为自动驾驶的体验保障与安全冗余,实践上没有高精地图数据是不能成立的。
轻地图,重服务
某种意义上,城市场景的落地标志着“智能辅助驾驶下半场的开局”。
包括腾讯、百度、四维图新等在内的高精地图服务商们也在探寻通往更高阶自动驾驶的轻地图方案。
相比之下,全道科技首次以“可视化”的方式,向业界展示了更为细分、更加适应量产落地的轻地图方案路线。方案复用了众源量产车车端BEV(或单目视觉)的单帧感知结果,基本不额外增加车端算力,另外由于是回传单帧感知成果(10KB量级),不是回传原始的图像信息,回传带宽可行,回传云端后,在云端进行SLAM建图对齐、矢量化、生成车道等一系列自动化技术,形成轻量化的地图,从而赋能主机厂实现城市NOA功能的快速落地部署。

基于以上诠释,全道科技在“轻地图闭环解决方案”中,保留智能驾驶所必需的基础要素,同时围绕“轻地图”给出了“轻绝对精度”、“轻要素”等方面的详细介绍。
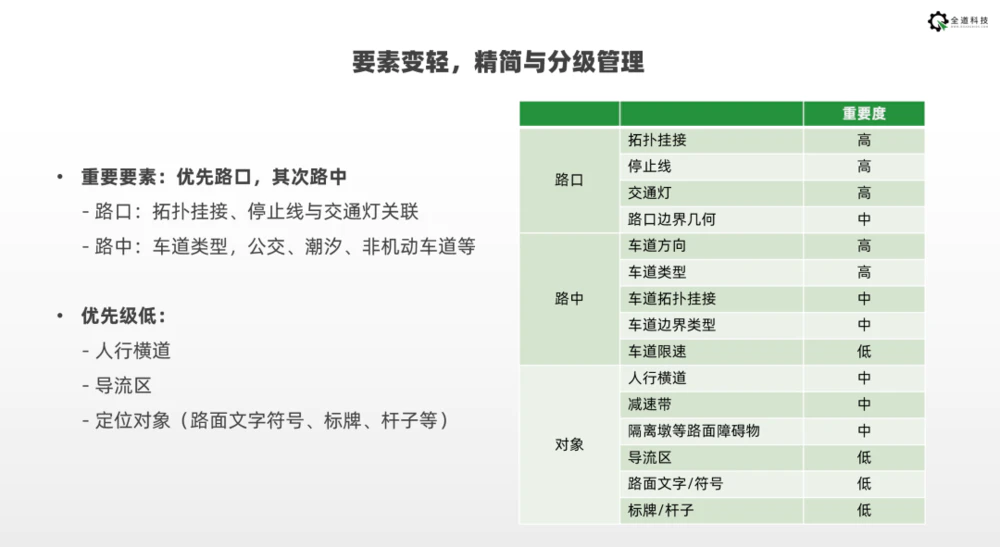
具体而言,首先是提供城市NOA过程中的相对定位,以此避免由于建筑物遮挡导致的自车绝对精度定位不准确的问题。其次,重点保障优先级高要素(例如重要路口的拓扑、停止线、交通灯等)的准召,重点保障自动驾驶的行车安全,优先级低的定位对象(如标牌,杆子)保证准确就行,其他要素根据实际NOA中的需要进行优先级处理。在确保城市NOA可落地可实施的同时,大幅度提升轻地图的制作与使用效率。
每份地图产品完成绘制交付,并不是使命的完结,而是地图更新闭环的开始。相比依靠一次性售卖地图数据的传统图商,全道科技在创立之初,便将自动化建图和更新作为发展的目标的,并早已定位为MaaS(Map as a Service),即为主机厂提供数据服务。
而对于主机厂而言,能满足需求的自动驾驶地图究竟是什么?
从车企科技伙伴的角度,有业内人士给出了自己的答案:自动驾驶市场亟需一个时效性高、成本可控的升级版高精地图,在提高数据采集频率的同时,将高精地图的成本也降下来。
作为产业自动化建图与更新技术的先行者,全道科技的实践经验是:打磨出一套完整的高精地图架构,通过高度自动化的数据处理技术与众源数据闭环,以及数据合规服务,为城市NOA提供完整的数据技术解决方案,支持主机厂建立起地图自更新数据闭环。
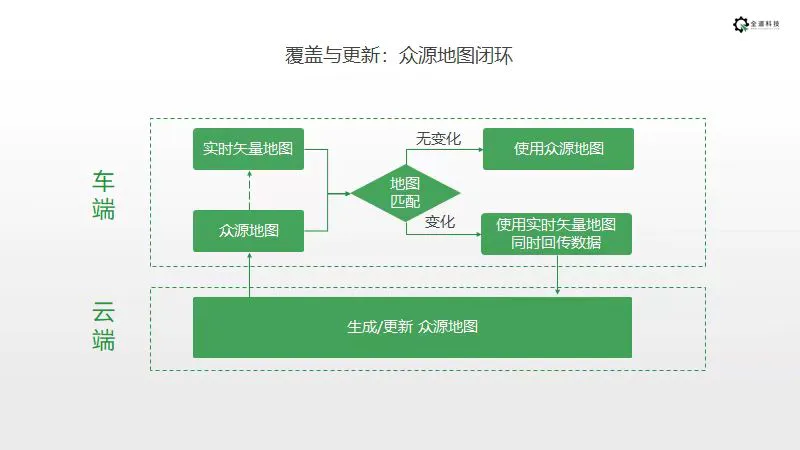
全道科技拥有实时矢量地图与众源地图矢量自动化的技术能力,这样的能力可应用于自动驾驶感知大模型的搭建与数据闭环的建设。全道同时具备语义SLAM技术,矢量化与增量更新技术,支持各种道路场景的对齐。各种技术能力的背后是全道科技丰富的量产落地经验与多年的技术积淀。
相较于还在酝酿轻地图方案的其他市场参与方,有技术背书的全道科技早先一步对外呈现了其方案与路径规划,也抢先令车企们及业内同胞看到了图商视角下的“轻地图”究竟如何。
上车三步走,感知+地图数据闭环
NOA正跑步进入城市赛段,目前整个汽车行业亟待性价比更高的辅助驾驶解决方案打开局面。
以蔚来、小鹏、理想、吉利、长城等为代表的自主车企,以及华为、百度、福瑞泰克、Minieye等自动驾驶技术公司等,争相涌入城市赛道,都希望“自身的城市NOA落地节奏能比同行快”。
不过站在当下的时间节点来看,城市NOA下的高阶辅助驾驶解决方案仍在摸索阶段,找到令用户感到合理的路径仍旧是各市场参与方的期盼。
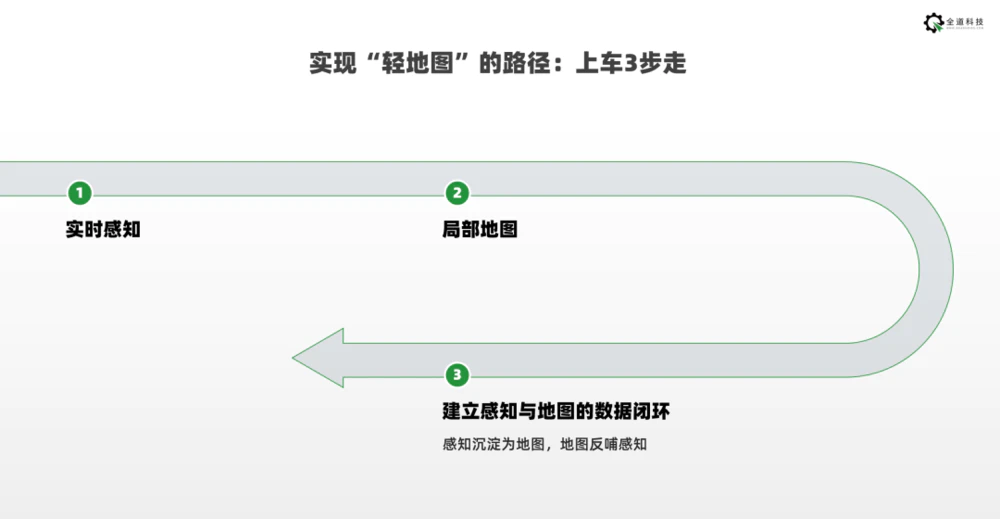
按照全道科技的路线规划,城市NOA量产上车需要经过三个阶段。
第一,基于车端实时感知结果。第一步是覆盖城市大部分简单场景的实时感知先上车,实现基本城市NOA功能,让大家能尽快体验到城市NOA能力。而基于BEV感知大模型能力,全道可提供实时矢量地图。
第二,基于人工作业的局部地图。局部地图应被应用于城市关键场景,例如对重点的路口、复杂路段的覆盖。通过片段式地逐步上车,可以逐步扩展城市NOA中ODD的运行区域,逐步减少人工接管的自动驾驶场景。
第三,建立感知和地图的数据闭环。通过感知结果沉淀地图数据,地图再反哺感知,实现整个地图的自动化构建与更新,通过这样自更新的闭环流程,最终才能实现城市NOA无限逼近0接管、完全无人驾驶的目标。
而上述目标的实现,自然离不开产业链上下游的合作共赢。王闯表示,“例如车端能通过算力和模型的实时感知,落地并沉淀下来。只有车端能输出一个好的感知结果,实现城市80%场景的覆盖,轻地图才有输入与覆盖。再比如车端的OTA能力以及回传的基础设施等,这些都需要产业生态的合力推进,才能推动城市NOA更好的发展。”
当市场向更多场景与更前沿的技术迈进,全道科技以“数据技术服务”替代“数据售卖”的市场布局已徐徐展开。
“今年,公司将专注自身内部的技术研发,进一步完善方案。同时,我们也在与主机厂进行技术对接。”如果给NOA“进城”之路一个时间节点,王闯预估全道科技或将在2025年之前实现体验好的方案的量产上车。23年将是技术研发的关键节点。











{{item.content}}