
被收购方GeoSLAM是基于英国的三维激光扫描领域杰出的公司。

到2030年,空间感知机器人的市场规模预计将超过1000亿美元。
这笔资金将用于企业并购和研发关键技术,包括并购美国计算机视觉和AI公司Artisense。

激光Lidar+SLAM背包结合--高效率高精度测图。

SLAM下一步更需要的是一个更适合的处理器,首先最好是在On-chip方式上实现Deep Learning。

与现有方法不同,Dibotics的Augmented LiDAR软件实现了3D SLAM技术,该技术仅需LiDAR传感器的数据即可实现3D地图构建。

WiFiSlam创始人离开了苹果,担任孵化器公司StartX公司CEO。尚未知苹果室内公共设施导航会受何种影响。

面向机器人市场的三维视觉传感器,90后学霸创始人带来了他们的最新成果。
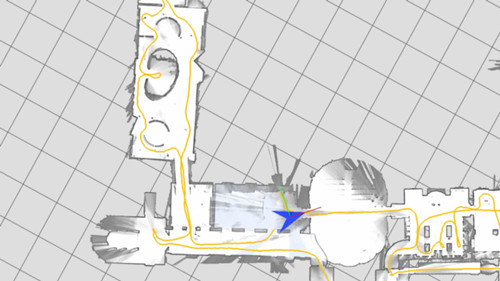
这项发布于GitHub上的开源技术可同时用于二维与三维空间的移动映射。 同时,Cartographer 还搭配有开源机器人操作系统(ROS)

8月31日,小米正式发布米家扫地机器人。

实时3D SLAM算法的先驱与激光雷达深度联姻。

3D SLAM激光背包测绘机器人在高精室内地图构建与室内定位导航中的应用。

SLAM如何发展到今天的

我们已经嗅到了SLAM将在各个领域全面入侵的苗头
来自上世纪80年代机器人智能技术的自我突破与跨界。
“小萝卜”如何实现室内定位。

在智慧城市峰会中,北京华泰天宇科技有限公司总裁郑勇带来了主题为“室内移动测量解决方案:SLAM”的精彩演讲。

一家名为ByteLight的公司,采用的另一种技术:通过LED照明设备提供准确的定位数据。这是室内定位目前较可行的技术方案之一。它在去年10月份刚刚拿到125万美金的风险投资。

据国外媒体报道,苹果已经收购了室内地理位置服务厂商WifiSLAM,这可能是室内移动地理位置服务大战升温的一个信号。

该团队的目标是开发一个智能手机应用,利用建筑内的WiFi无线信号将室内的定位精度缩小到2.5米之内。手机内置的指南针和加速计也会协助确定位置。该团队计划分几步走,一开始先实现室内导航,然后是形成适合终端客户使用的商用产品,最后是加入社交网络属性。