7月11日,自动驾驶技术公司Momenta正式公布了自主泊车方案 Mpilot Parking。这是继3月对外展示面向高速场景的可量产自动驾驶解决方案 Mpilot Highway 后,Mpilot 系列方案的第二次亮相。Mpilot Parking 目标服务于前装乘用车,在保证系统安全的前提下,解放驾驶员每天30分钟的取泊车时间,让车主好停车、好找车。该方案利用量产传感器,在停车场复杂的车流人流环境下,实现单车智能,包括跨层泊车、智能绕行、避让车辆行人、在线寻位、智能召唤等多项功能。
Momenta Mpilot Parking Demo
| 每天解放30分钟,让车主好停车、好找车
Momenta Mpilot 是 Momenta 于今年3月发布的可量产自动驾驶解决方案,场景包括高速(Mpilot Highway)、泊车(Mpilot Parking)以及城市道路(Mpilot Urban)。本次对外发布的 Mpilot Parking,可实现从停车场入口到指定或任意车位的自主泊车,以及从车位到指定地点的远程召唤功能。Mpilot Parking 的适用场景包括住宅、办公楼、商超、酒店以及共享出行等。
据统计在中国一线城市,有车族平均耗费15分钟进行一次停车行为,如果按照一天两次操作,那么每天就可以节省30分钟,一年将节省至少150个小时,相当于18个工作日。对于在城市中工作生活的人,可以节省大部分停车难、找车难的窘境,解放大量的时间。
| 一镜到底揭秘三大亮点
Momenta 此次公布的自主泊车技术 Demo,采集于苏州办公室地下约500平米的停车场。用户在手机端点选指定车位后,车辆可自行从地上停车场入口下坡,完成泊车期间的一系列功能;当用户取车时,可以在远程召唤车辆来到指定地点,驾驶员上车后自主行驶出停车场。
亮点一:应对复杂车流人流,更智能
在停车的真实场景中,往往会出现各种复杂情况,如行人穿行、车辆占道、路口错车、突然出车等。Mpilot Parking 具备智能的规划策略,除了常规的停车让行功能以外,对于车辆等障碍物,我们通过对周围动态环境的感知,实时的规划出绕行轨迹,避免因自动驾驶车辆无法处理会车、逆行、占道等情况而引起交通拥堵。
亮点二:实时车位识别,支持选定车位或在线寻找车位
住宅和写字楼,是车主每天通勤的高频泊车场景,往往会有固定的停车位或经验轨迹;在商超、酒店、机场这类对泊车有高需求的公共场所,停车位不固定,需要系统能够实时探测车位,并判断车位占用信息。
Momenta 通过预先建好的停车场高精度地图,可获取该停车场所有的车位信息,车辆在行驶过程中,融合环视感知以及超声波雷达感知的结果,可对车位空闲状态作出识别,自动判断所经过的车位是否可泊入。
亮点三:视觉自动建图,精度高,可众包
相比昂贵的激光雷达建图,Momenta采用视觉为主的方案实现自动化建图。建图采集系统使用四路环视鱼眼相机、消费级IMU及轮速等传感器。在建图过程中,通过深度学习算法提取视觉语义特征,使用SLAM技术自动生成基于语义的高精度地图。整个系统可进行云端和车端自动建图,精度达到10cm级别。
每个搭载 Mpilot Parking 的车辆既是高精度地图的使用者,又是贡献者。Momenta 的建图方案支持量产车辆自主建图,可通过众包实现快速规模化的建图和地图更新。随着时间的推移,停车场中增加或消失的元素可以通过众包车辆进行地图元素的更新。因为地图采集系统、建图系统和定位系统是基于同一套平台,车辆在进行定位时,如果发现真实环境和地图无法匹配时,就可以验证地图的准确性并及时进行更新。
Momenta 车端自动建图
| 深度学习技术落地的挑战
Mpilot Parking 的功能,离不开背后强大的深度学习能力。Momenta 的环境感知和高精度地图技术均以深度学习为基础,在量产落地的过程中,如何将深度学习运行在车端的嵌入式芯片上,Momenta 也积累了大量实践。
相比于服务器的运算能力,车规量产的芯片往往提供的算力资源有限。例如,一般在深度学习训练服务器上用的算力往往有上百 TFLOPS,而目前较前沿的车规级芯片的性能最多仅为 30 TOPS 左右。如何将多个深度学习模型压缩到一块有限算力的芯片上同时又保证精度,这非常考验工程优化能力。
Momenta 从多个维度对深度学习进行深度优化。首先,芯片上往往会有不同的计算单元,需要在这些计算单元上,将深度学习的网络层进行计算优化,如卷积等操作;其次,针对不同的任务类型,可以对模型结构进行自动搜索,产生高效率、高精度的模型;再次,对模型进行低比特量化操作,在保证模型精度不损失的同时,使得模型在芯片上发挥出极致性能;最后,根据特定芯片的特点,从算法角度可以研发更加芯片友好的网络和算法框架。
| 基于千元级可量产硬件方案
Mpilot Parking 系统搭载4路环视鱼眼相机、1个前视相机、12个超声波雷达、消费级IMU和GPS,整个系统全部采用可量产的传感器。
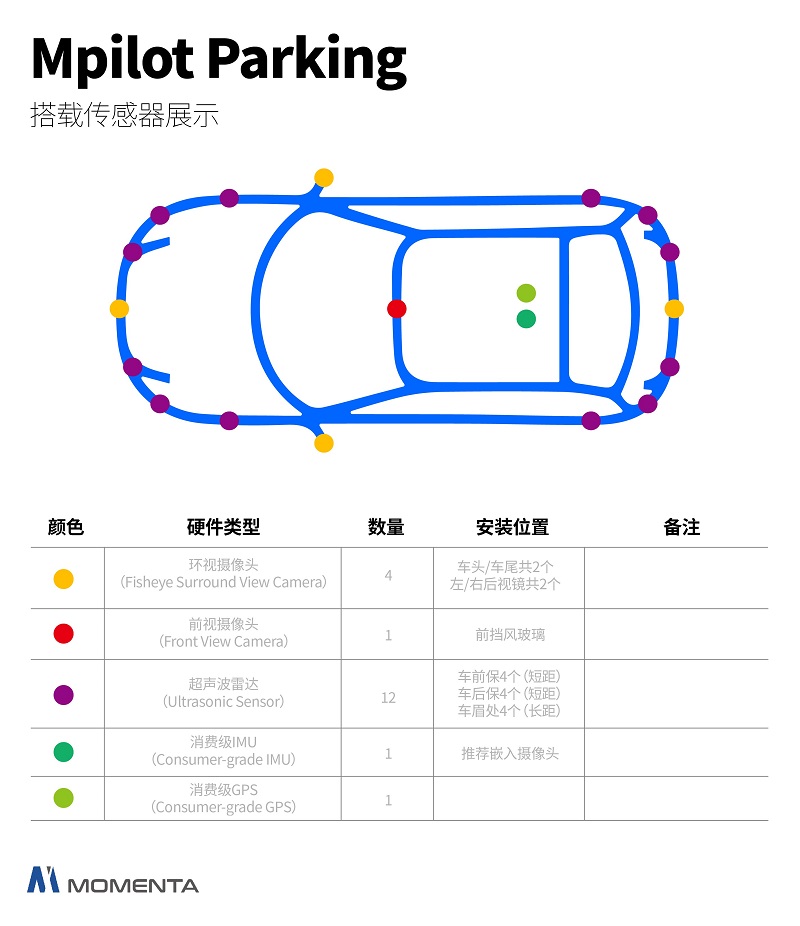
Mpilot Parking 搭载传感器展示
虽然 Mpilot Parking 对外展示的是单车智能无需场端改造的技术能力,但是可以灵活根据客户的需求,接入其他场端信息。Mpilot Parking 希望能通过以视觉为主的传感器方案,将系统在车端量产方案下的潜力做到极致,同时加入客户定制化需求,在保证安全性和鲁棒性的前提下实现更多复杂功能。
| Mpilot —— 最大化连续自动驾驶时长
Momenta 打造 Mpilot 可量产自动驾驶解决方案的初心,是希望能够最大化连续自动驾驶时长,提供给用户最好的自动驾驶体验。在个人乘用车上,用户最高频的使用场景是上下班的通勤,往返于家和公司,也就是从停车场到停车场。Momenta希望能够在用户最高频的使用场景上,提供从停车场取车——上高速环路——城市道路——停车场泊车的连贯的自动驾驶体验。此次发布的 Mpilot Parking,正是连续自动驾驶体验中重要的首尾一环。
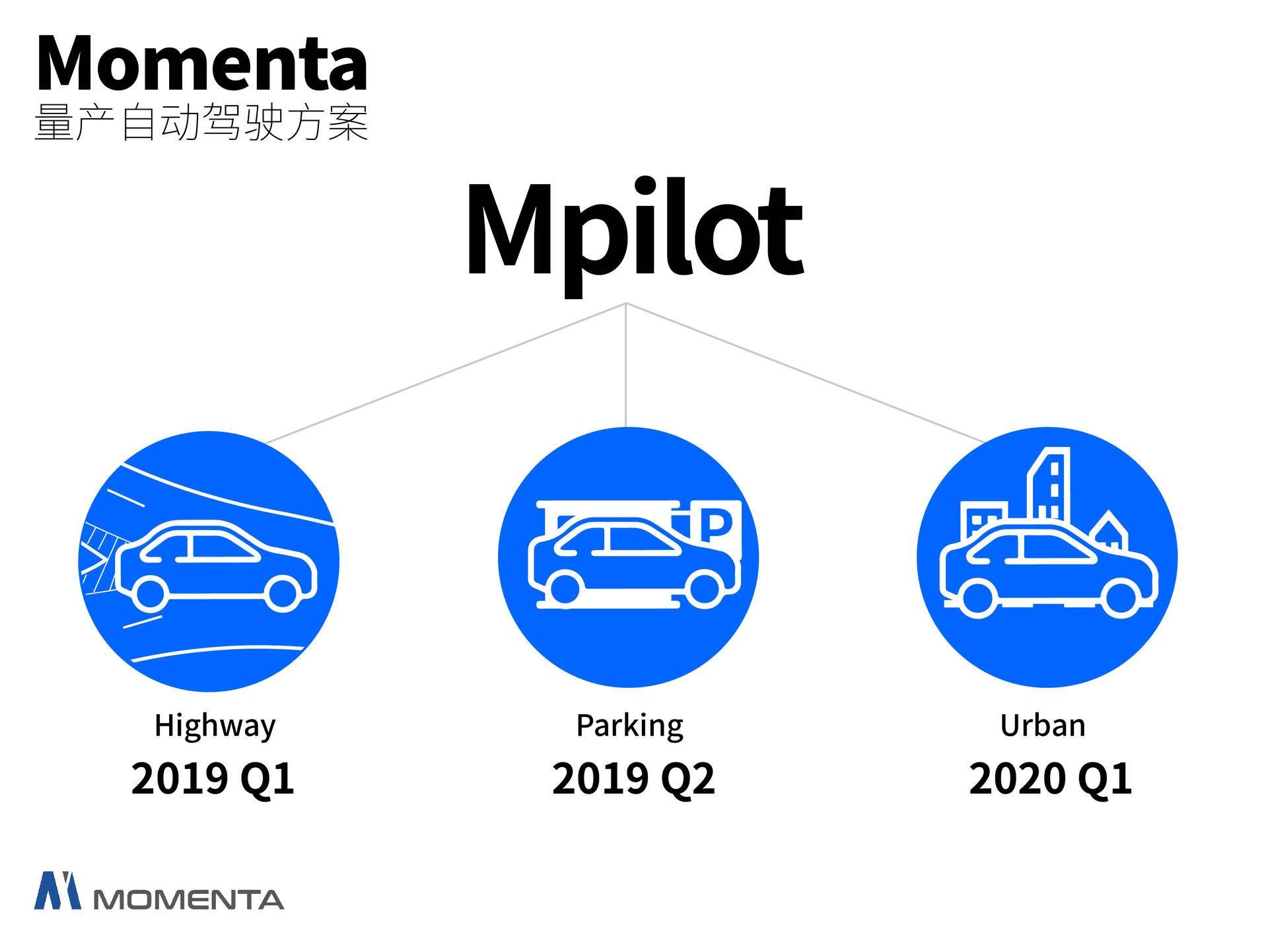
Momenta 自动驾驶解决方案路线图
Mpilot 的整套方案,是基于一套标准的硬件计算平台:10个相机、12个超声波雷达、5个毫米波雷达,辅以其他传感器。这样的一套硬件方案,可以同时支持不同场景的自动驾驶,如 Mpilot Highway 和 Mpilot Parking。通过在不同场景下传感器和计算单元的分时复用,可以让终端用户获得「双份体验」,让主机厂客户实现「二合一」成本优化。
| 关于Momenta
Momenta 成立于2016年,公司致力于打造自动驾驶大脑,核心技术包括基于深度学习的环境感知、高精度地图与定位、驾驶决策算法。
Momenta 的战略方向是量产自动驾驶与完全无人驾驶协同,应用场景覆盖高快速道路、停车场环境以及城市道路。围绕量产自动驾驶与完全无人驾驶两条腿走路,Momenta 通过数据、数据驱动算法和两者之间的迭代闭环,推动自动驾驶技术落地量产,并最终实现无人驾驶。
2019年,公司已先后推出面向高快速道路的 Mpilot Highway 和面向泊车场景 Mpilot Parking。











{{item.content}}