泰伯网讯 据凤凰网科技报道,美国时间1月10日,继CES首日发布MEMS固态激光雷达RS-LiDAR-M1 Pre 后,速腾聚创(robosense)今日在拉斯维加斯CES上发布激光雷达领域技术:MEMS激光雷达和摄像头的底层融合技术和基于高精地图的激光雷达整体感知系统。

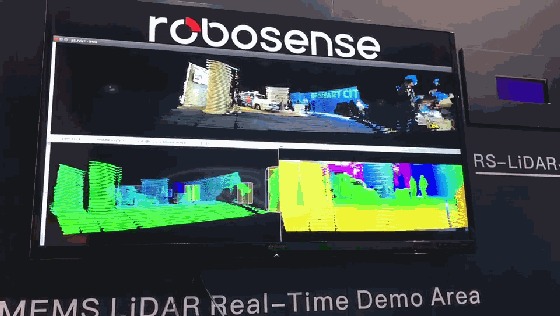
速腾聚创CES展台现场
速腾聚创(robosense)所展示的LCDF( Lidar-Camera-Deep-Fusion) 技术,创新性在于,把MEMS固态激光雷达RS-LiDAR-M1 Pre与摄像头进行硬件上的底层融合,从而让自动驾驶车辆能全方位感知真实世界的三维空间色彩信息。传统的做法是把多个分立传感器的数据分别收集与处理,每一个下游的厂商都需要单独将分立的传感器进行标定,很难做到时间上的同步与空间上的校准。 LCDF技术让两者预先融合,保证了两者的时空一致性。高速的三维空间色彩数据让自动驾驶车辆在做决策算法之前,实时感知并处理相关信息,应对复杂的道路情境。
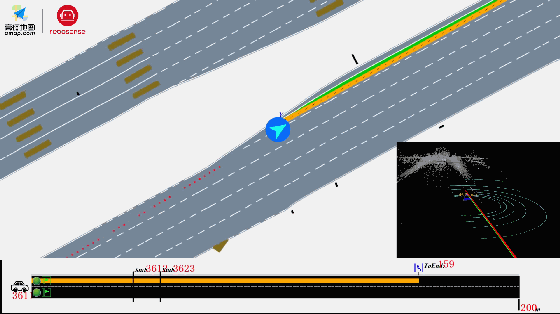
高精度地图与激光雷达环境感知的融合壁垒尚未打通,导致多数自动驾驶研发团队在应用中出现了极大的困难。速腾聚创所展示的“基于高精地图的激光雷达整体感知系统”,该方案是由速腾聚创与高德地图合作研发。
在CES首日,速腾聚创也发布了RS-LiDAR-M1 Pre ,采用MEMS技术方案,替代了传统的机械旋转方式,使得机器更加紧凑,更容易嵌入任何车体。该款雷达探测距离高达200米、角高分辨率达到0.09°x0.2°。










{{item.content}}