3月26日,中国科学院地理科学与资源研究所基于无人航空器管控系统RUNET在北京成功进行了监控全国多地无人机地理位置信息测试演练。该系统的成功测试,可为国家有关部门和各行业在基于动态地理电子围栏等技术管控无人机提供研究解决方案。
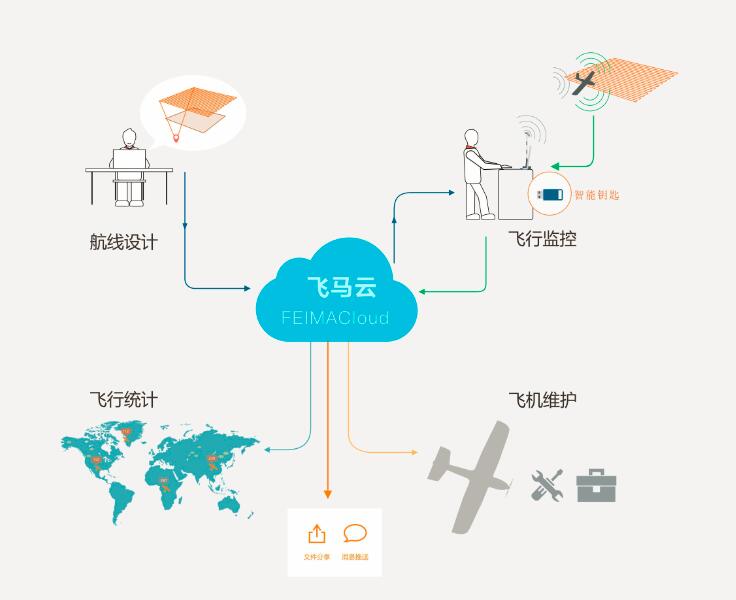
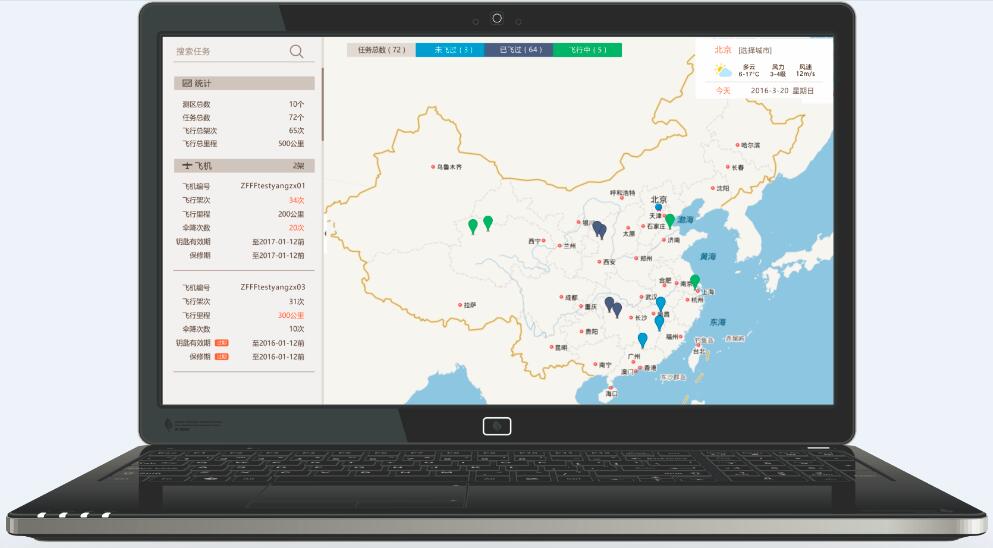
在此次演练中的RUNET系统融合了业内多个主流无人机监管系统,如飞马机器人公司的“飞马云”系统,该系统是基于飞马机器人公司自主研发的“云播”技术搭建的一套无人机监控平台,它可以为无人机用户提供历史飞行回放、实时飞行监控、飞行任务推送以及协同作业等,并且还可以实现无人机云端的健康分析和故障诊断等。
当前,无人机行业发展如火如荼,伴随着无人机飞行及作业量的不断上升,黑飞的问题也愈发严重。在此大环境下,对无人机本身和使用的规范也就显得越来越重要。
飞马机器人所研发的“飞马云”系统,包含了地面身份认证模块、云加电台通讯的链路模块,以及管理系统三部分,可以提供安全可靠的双向实时监控能力。相比于基于GPRS的监控方式,在链路实时性、监控可靠性以及监控高度等方面具有明显优势。另外,飞马云播链路采取了先进的压缩算法,保证了最小网络带宽需求,即使是手机网络也能轻易满足监控需要。
在无人机身份认证方面,飞马机器人为每一架出厂的飞机配备加密钥匙。每一把加密钥匙都单独匹配一架飞机,具有安全认证、身份识别、权限分级等功能。尤其是在权限设置方面,钥匙的级别可由无人机所属单位自行设定,可实现一钥专管,或一钥多管。对于特殊需求还可以定制化的实现最高级别管控加密钥匙。这样不仅可对所有无人机实现统一管理,也可以通过最高权限对任何超越限制的无人机进行单独、实时的管控。

在如来天网全国多地无人机地理位置信息测试演练,飞马云监控系统让无人机监管告别了无人机只能监控不能管理,位置监控到飞行全状态监控,低频监控到实时监控等多个方面的突破。
在未来,无人机的监管应当往“监”“管”结合、双向链路、全状态实时呈现、身份认证和飞行申请结合等模式发展,飞马云作为行业的领先技术方案,在已有的技术基础之上,继续完善,向上服务国家,向下服务用户。











{{item.content}}