3sNews讯 斯坦福大学计算机视觉和几何学实验室(Computational Vision and Geometry Lab)正在开发一个叫 “Jackrabbot”的机器人 ,希望它能理解道路上的复杂规则。该团队曾开发过用于追踪和预测行人活动的计算机视觉算法。
道路上的规则可谓错综复杂,各种不可控的变量因素随时都需要作出及时的应对。Jackrabbot和其他机器人一样,需要不断学习,才能使海量数据产生有用的结果。另外,研究人员正在开发的这种算法打算完全依靠一个神经网络解读出的观测数据,不允许研究人员向机器人发出在他们看来显而易见的提示(比如“在这种情况下,人当然会左转”)来调整机器人的前进方向。
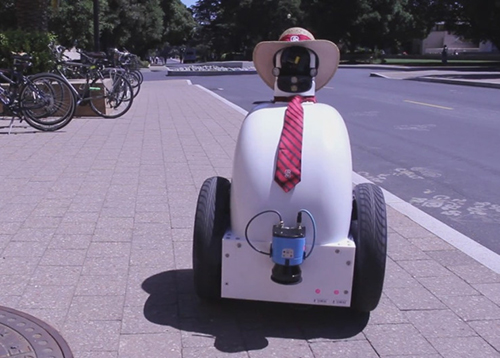
目前,衣着华丽的 Jackrabbot 是由人工操控的,研究人员正在试着把他们的模型与机器人的感官整合起来。Jackrabbot 是由 Segway RMP210 改装的,装有几个立体相机、一个激光扫描仪以及 GPS。它无法获得训练数据那样的俯瞰视角,但如果知道速度和距离,它应该能够计算出路上每个人在空间中的坐标,并以与训练数据相似的精确度预测人的运动。
这样的研究项目将与其他大量的研究一道,最终使机器人能像我们一样在房间里和城市中快速、安全地自由穿梭,同时体谅他人。就像自动驾驶汽车将彻底改变城市的街道一样,自动行人机器人(仿真或非仿真机器人)将改变人行道的面貌。(整理|3sNews 陈浩丽)











{{item.content}}