诺基亚公司目前需要面对一个问题,那就是,“我TM到底是谁?!”好吧,我们暂且先不谈他们手机业务被微软收购这件事,今天要说的,貌似能让诺基亚再爷们儿硬一次,诺基亚旗下的 HERE 地图团队正在构建下一代地图数据,他们把这款全新的地图产品称为“HD Map”,也是给了如日中天的谷歌地图一个下马威。

诺基亚染指导航领域已经七年有余了,他们最初是从收购地图数据公司NAVTEQ开始的,不过就这么一个收购交易,却被双方拖拖拉拉了十多年,直到2011年,诺基亚才彻底搞定了对NAVTEQ公司的整体收购。次年,诺基亚就创立了HERE地图品牌,当然,这个品牌出自于诺基亚公司之前广为人知的位置与电子商务部(Nokia Location&Commerce)。实际上,HERE地图已经广泛用于Windows系统和Windows Phone 手机,而且Bing Maps也使用了HERE引擎,此外,许多汽车OEM制造商开发的车载导航系统也采用了HERE地图。
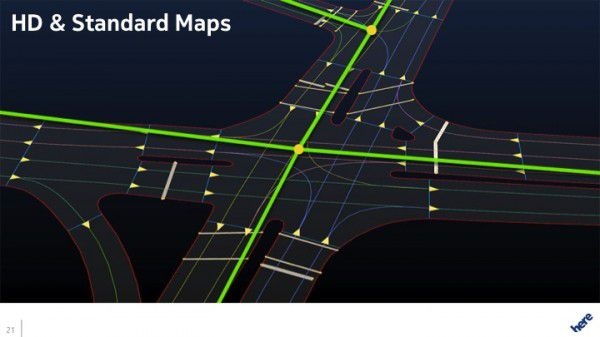
事实上,如果你使用HERE这款地图就会发现,产品还是非常简单直观的。如下图所示,地图上的行车道和马路边缘都是图形化的,而且在各个交叉路口都设有节点,整个路线是由各节点连接集合而成,地图上会显示许多道路属性的细节数据,包括该道路允许的最大车速,车道大小,车道数量,以及车道间是否有间隔,等等。

上述很多功能对于一个基本导航地图来说以及足够了,不过HERE希望能够再领先一步,他们意识到自己必须要开发出下一代地图产品,这样不仅能提供基于特定地理位置的服务,而且还能应用在自动驾驶汽车上面。
HERE互联驾驶部副总裁Ogi Redzic认为,如今的汽车地图能够满足导航需要,但如果是未来的自动驾驶汽车,那么就需要一种完全不同的地图,而这,恰恰是HD Map的方向。
HD Map利用的是 LIDAR (光探测与测量)激光测绘技术,该技术已经应用在了诺基亚推出的6800万像素街景汽车上了。
LIDAR使用的是一个快速旋转的激光器,对汽车周围区域进行探测,然后测算出周围物体与汽车的间距。每个LIDAR设备价格都是非常昂贵的,诺基亚公司表示,他们之前推出的第二代街景车上使用的摄像头和激光器的总成本,其实和LIDAR差不多,但是后者则更精确,精准度更高。
当搭载HD Map的汽车上路之后,它就会把汽车周围的路况图像收集起来,形成一个“点云”,这个点云是由许多独立的云点组成,每个云点都代表了一个由激光集点反射回来的地理位置。这个数据是非常精确的,但问题是,存储这些数据需要耗费巨大的储存容量。诺基亚公司的数据采集车每天会收集140GB的路况数据,其中就包括了LIDAR探测的激光数据和图像数据。
事实上,HERE团队基于收集的激光数据,开发了一个矢量数据模型,这样可以把那些数百千兆的地图数据缩小到一个更合理的存储大小。不过有一点值得注意,那就是普通的地图都是以成对的横断线显示的,而HD Map则向前迈了一大步,如下图所示:

从上图可知,未来,应用在自动驾驶汽车商的下一代地图实际上就是构建在矢量模型上的,而且它是三维立体展示,每一行道路不再以X轴Y轴这样二维方式展现,而是以X/Y/Z立体方式展现的。这个建模地图实际上是诺基亚公司根据实际道路表面情况,而且,它是根据收集到的每个独立激光反射云点构建的。HD Map不再是按照路线开发,它的每条道路都是单独建模的,这样精准度就会更高。
这么说可能还是有些抽象,举个例子吧,比如如果车主要向左转,普通的导航地图会给你一个向左转的大箭头,然后就没有了,而HD Map则会显示出,你必须要变道到最左边的那个车道上,才能左转。这就是精确的元数据所带来的效果。
另外,HERE团队开发的HD Map还是三维显示,这个功能可以告诉车主,道路上是否有上坡路或下坡路,我们知道上坡路很费油,即便你有了一个最短路线,但是如果路况不佳,反而更耗能。而HD Map却能够为你提供一个最经济的路线,对于那些重载汽车运输公司来说,这个功能特别有用,因为他们的汽车都是最耗油的大卡车,如果应用HD Map,每年可以为这些公司节省一大块油费成本。
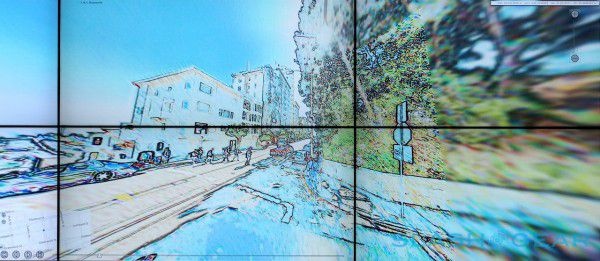
同时,诺基亚汽车上的高清摄像头也可以捕捉各个方向的图像,如下图所示,HERE团队则会把收集到的图像和LIDAR点云数据结合起来使用。

Jane MacFarlan是诺基亚公司HRER团队研究主管(见下图),他表示,当把图像和云点结合起来以后,就可以对给每个云点上添加色彩。这样,车主在开车的时候看到的街景图就是彩色的了。

HD Map完全可能以此来开发3D立体全景图,而他们的竞争对手,谷歌公司的街景车,似乎在3D街景图上略微逊色一些。现有的3D摄像机是固定在一个位置上,然后旋转拍摄周围立体图像的。但是摄像机和周围场景都必须要按照一定顺序才能最后生成出全景图像。
相对而言,诺基亚的系统则可以同步抓取周围图像和LIDAR云点,这样就可以在移动的状态下生成立体全景图。HERE团队还可以实时给LIDAR云点图像添加颜色,这个功能对于汽车制造商还是挺有用的,因为他们可以和HERE团队合作,开发与自己汽车仪表盘颜色相匹配的地图全景图色。
最后,Redzic提到了汽车传感器的重要性,他认为在一定程度上,车主可以信赖汽车传感器,但是如果有一辆大卡车在你前方(如下图所示),你根本就无法看清前面具体的车况。那么你还应该相信自己的传感器吗?你必须知道当前道路上的整体车况,前面会有什么情况,有几条车道,天气条件如何,马路上是否有结冰,等等。
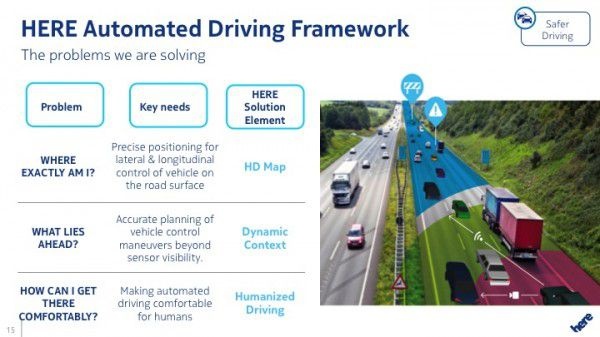
这就需要实现车与车之间的交流,然后和云端保持好联系,其中一个方法,就是可以为车主提供一个车身周围路况的鸟瞰图。Redzic认为,如果汽车在高速行驶时,传感器最好可以监测周围100-150码的车况。
事实上,诺基亚在汽车行业的野心并没有那么大,也就是说,也许你看不到一辆诺基亚牌的汽车,当然,他们不希望在重蹈自己在手机行业里的覆辙,去年,诺基亚公司和梅萨德斯奔驰进行了自动驾驶汽车方面的合作,他们希望采用合作的方式,帮助汽车制造商开发互联汽车。











{{item.content}}