
1、系统的软硬件组成
全景激光移动测量系统是将多种传感器,如全球定位系统(GPS)、惯性测量单元(IMU)、立体相机、全景相机、激光扫描仪(LIDAR)等集成在车载平台上,沿道路采集空间地理信息数据,可以快速地提供精确的多元数据流,并在内业环境中对采集得到的数据进行进一步加工,生成专题成果图的一种快速多源数据采集和生产的系统。立得空间信息技术股份有限公司(简称立得公司)的LD2011型全景激光移动测量系统能够实现沿道路的基础地理信息数据快速更新,与人工测绘、航测相结合,能够形成点状、带状与面状空间数据测绘的完整解决方案。
1.1系统组成和功能
MMS主要由定位定姿系统、成像系统、支撑平台、数据处理软件及成果应用软件平台几个部分组成。
1) 定位定姿系统:包括GPS、DR、IMU等,是决定系统精度的主要因素;
2) 成像系统:包括CCD相机、视频、激光扫描仪等,是决定应用方式的主要因素;
3) 支撑平台:包括电源、机械平台等,是MMS采集设备的安装和运行支撑;
4) 数据处理软件:包括集成定位定姿处理、多源数据侧成图处理等,是信息提取、目标测量等专题应用数据制作分布式写作的平台;
5) 开放应用平台:一组B/S架构的开放应用接口,可将全景激光MMS原始数据和成果数据应用到其他的业务平台中,提供广泛的支持和专题服务。
1.2数据采集设备
本次试验的数据采集设备为LD2011型全景激光移动测量系统一套,其外观如下图所示:

图3 LD2011型全景激光移动测量系统外观
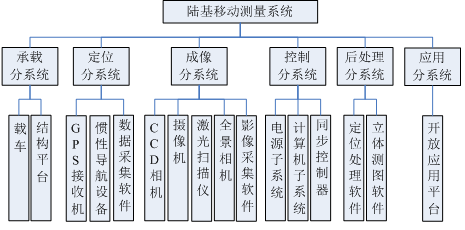
全景激光MMS主要由定位定姿系统、成像系统、支撑平台、数据处理软件及成果应用软件平台几个部分组成。
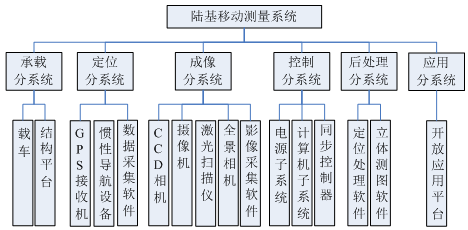
图4 系统组成
1) 定位定姿系统:包括GPS、DR、IMU等,是决定系统精度的主要因素;
2) 成像系统:包括CCD相机、视频、激光扫描仪等,是决定应用方式的主要因素;
3) 支撑平台:包括电源、机械平台等,是MMS采集设备的安装和运行支撑;
4) 数据处理软件:包括集成定位定姿处理、多源数据侧成图处理等,是信息提取、目标测量等专题应用数据制作分布式写作的平台。
系统标称指标如下:
a) 整体指标
- 激光点云量测范围:≤ 80m;
- 激光点云垂直方向视场角:300°;
- 立体影像量测范围:≤ 40m;
- 全景影像视场角:360°×145°;
- 系统绝对测量精度:0.5m;
- 系统相对测量精度:5~10cm;
- 作业车速:≤80km/h
b) 全景相机指标
- 整体解析度:最高5120×2560;
- 有效视场角:360°×145°(地面方向缺失);
c) 激光扫描仪指标:
- 整体视场角:300°(开口向上);
- 扫描距离:≤ 80m;
d) 定位定姿(POS)系统指标
- 航向姿态精度:0.05°;
- 绝对定位精度:0.5米。
e) CCD立体测量系统指标
- 相机解析度:200万像素。
1.3外业软件
外业软件安装在数据采集车上,用于控制各数据采集传感器,采集GPS、IMU、CCD影像、激光扫描仪和全景相机的数据。具体包括以下几个软件。
a) 全景影像采集软件:采集全景影像数据;
b) 多源数据采集软件:采集CCD立体影像数据;
c) 视频数据采集软件:采集视频数据,包括红外和可见光等;
d) 激光数据采集软件:采集三维激光扫描仪数据;
e) 空间数据采集软件:采集GPS、IMU数据;
f) 精度测试软件:数据采集前实时检测系统相对测量精度。
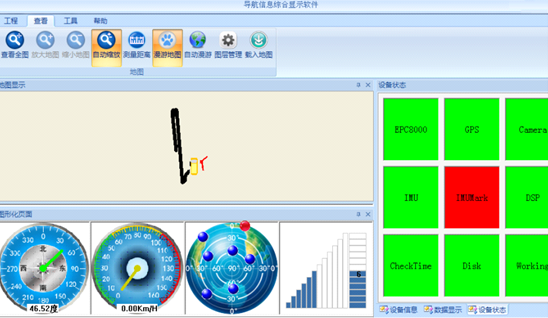

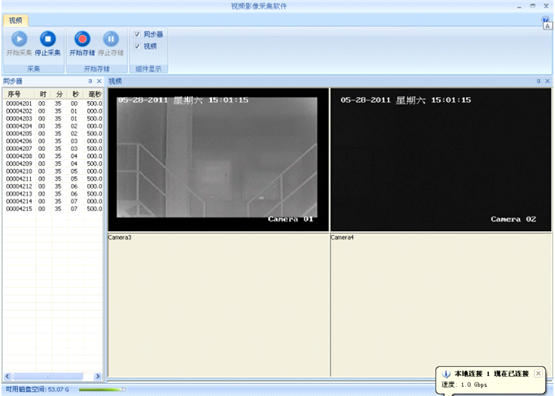
图5主要外业软件界面
1.4内业软件
内业软件用于数据处理和发布,按照数据生产处理过程,包括组合定位定姿处理软件、直接地理参考处理软件、多源数据测图处理软件和成果数据展示接口API等几个部分。
a) 组合定位定姿处理软件:将采集的GPS、IMU等数据进行事后紧密组合处理,得到精确的轨迹坐标和载体姿态;
b) 直接地理参考处理软件:将组合定位定姿处理输出的位置和姿态数据与CCD影像、三维激光扫描仪及全景相机采集的数据进行融合处理,对CCD影像、激光扫描数据和全景影像进行直接地理参考;
c) 多源数据测图处理软件:通过对经过地理参考的影像、激光点云等进行综合判读
d) 、测量,按照业务需求生产所需的数字线划图、综合部件数据库、三维模型框架、纹理等成果;
e) 成果数据展示接口API:将测量成果按照一定的规范进行组织后,可以通过一套开放的应用编程接口与第三方平台结合,进行紧密的业务集成,供用户自定义应用。
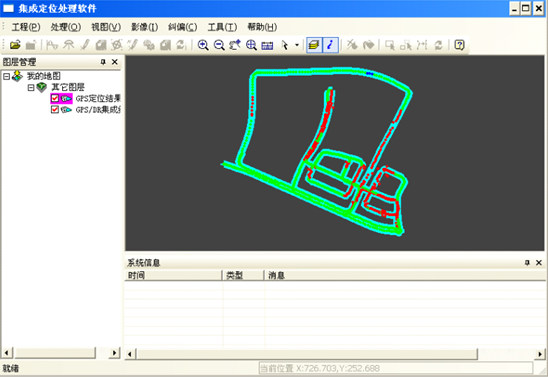
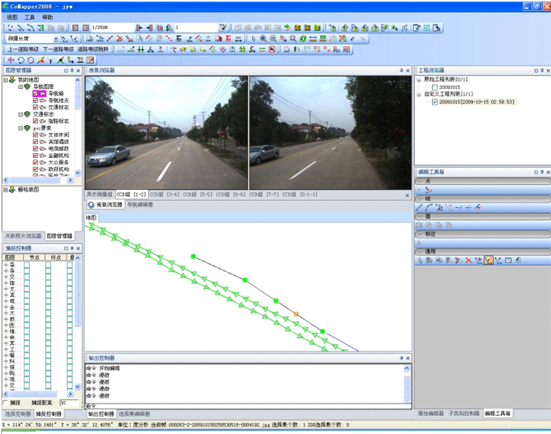
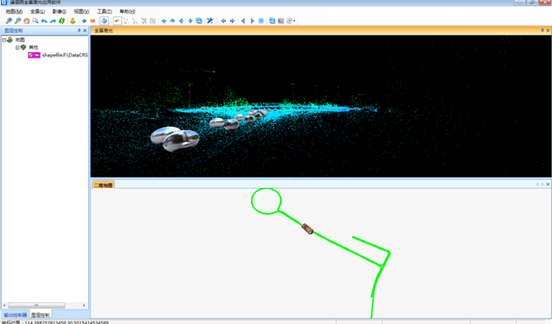
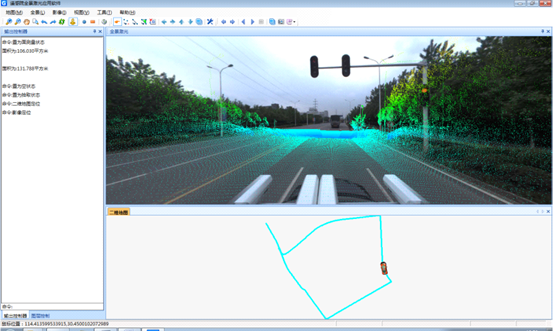
图6主要内业软件界面
系统整体软件关系如下图所示。
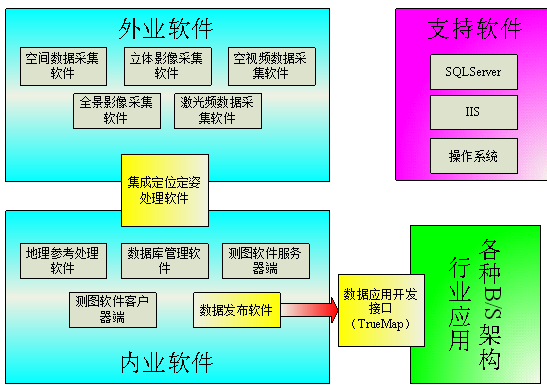
图7软件架构关系
2.数据采集和处理
2.1数据采集流程和采集内容。
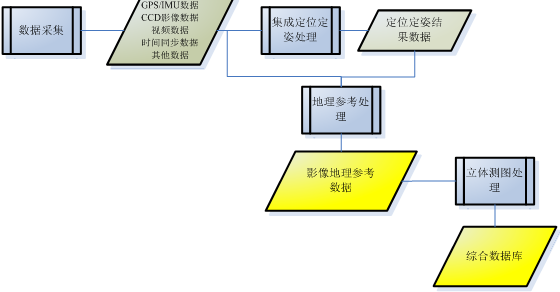
使用MMS生产专题应用数据要求遵循严格的生产工艺和流程,我们公司在销售MMS系统是会对用户进行专业的操作和应用培训。一般而言,使用MMS系统的步骤见下图:
数据采集:使用MMS车载采集系统在目标采集区域采集GPS/IMU、CCD影像等原始数据;
集成定位定姿处理:使用MMS系统配备的组合定位定姿处理软件,进行系统轨迹和姿态处理;
地理参考处理:使用MMS标配的直接地理参考处理软件,将CCD影像、视频等数据通过时间同步数据与定位定姿结果进行关联;
立体测图处理:使用MMS标配的Comapper软件,通过近景摄影测量技术,基于经过地理参考的实景影像进行测量、成图、建库处理,输入用户需要的成果数据库。
移动测量系统集成了多种专用传感器设备,可用于采集下列数据:
道路轨迹;
可量测实景影像;
激光点云;
全景影像;
可见光/红外视频数据;
专业传感器数据:噪声、空气污染...
2.2数据采集成果
在数据采集中,所有原始数据都能100%保存,用户可自行处理。主要包括下列数据:
GPS参考站/流动站数据:采用GPS设备原始数据格式,如Trimble Dat、Rinex等格式;
IMU:采用IMU设备原始格式,包括三个方向的角速度和加速度,时间等;
CCD影像:使用Leador大文件格式存储,也可解析为普通jpeg格式;
视频:普通MP4格式。
时间同步信息:文本数据。
激光、全景影像数据:LD2011系列全景激光MMS还能采集和存储全景影像数据和激光扫描数据,全景影像采用Jpeg格式存储或者厂家原始格式存储。激光扫描数据为Leador专用格式,可转换为通用las点云格式。
2.3最终成果内容及格式。
MMS最终提供的成果主要包括可测量实景影像、激光点云等,可以使用我们MMS配备的数据处理软件COMAPPER进行测图、建库,输出各个行业的专题数据,具体包括:
道路特征:中心线、边线、里程桩、破损...
道路附属设施:路灯、信号灯、标线、绿化带、停靠点...
市政设施:各类井盖、立杆、垃圾桶...
LBS专题应用成果:实景三维街景影像、面片...
第二代导航图:实景三维街景、道路转弯半径、高度、坡度...
PVGIS:实景三维警用地图、居民区、警用GIS数据...
铁路设施:信号机、限界信息...
2.4必须的外部数据。
MMS系统已考虑所有需要采集的数据,不需要其他手段和设备。但是MMS业保留了对传统测绘成果的接口,可导入航片、卫片和矢量地图等数据。
2.5系统精度和环境适应性
使用MMS进行数据采集时,采集效率很高,主要受限于道路状况,一般可以以最高100Km/h的速度采集数据。另外在下雨、下雪等恶劣天气下无法采集数据。
内业处理效率与成果用途和需采集部件数量有关,精度要求高、采集内容越多的项目,内业时间越长。对于典型的城管部件普查应用,平均一个熟练的内业作业员每天可以处理50Km。
任何一种工具都不能解决所有的问题,MMS系统的固有特性要求目标可视、可见,对于被遮挡的地物或者道路过于狭窄,采集车无法进入等情况,的确会存在部分目标无法采集的问题。
对于不同领域的应用,需要一个工艺设计的过程,移动测量是传统测绘方式的补充和完善,与传统方式结合起来,可大幅度提高测量、GIS数据采集、处理和建库的效率,同时可通过实景三维的DMI数据给用户提供一个富信息、直观易用、按需测量的工作环境,且实施快捷、易于更新,是满足于先进性、适用性和经济性的科学解决方案。
3.成果样本
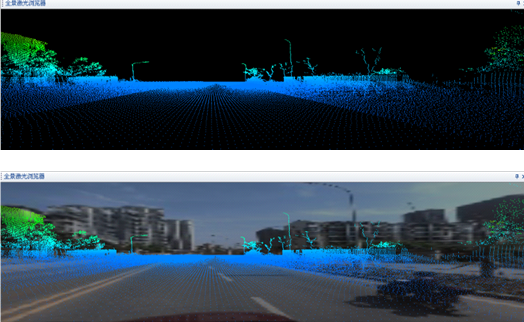
MMS系统的最终成果主要包括专题数据库、全景影像和可测量实景影像等,下面是典型成果数据的实例。

可测量拼接全景街景影像
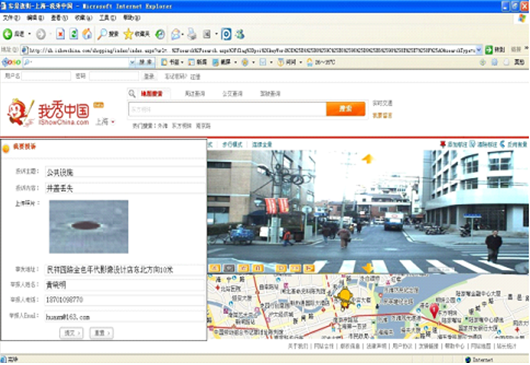
实景三维社区
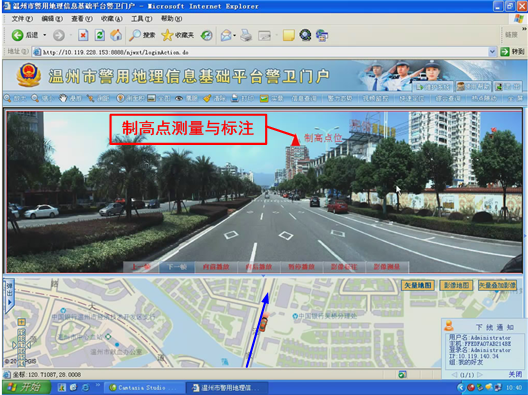
实景三维警用地理信息基础平台
4.成果数据指标
使用我们的高端MMS生产的数据成果,在GPS信号好的地区,其精度可达厘米级。综合绝对定位精度可达到0.5米以内,在GPS长时间无法定位的区域可通过使用控制点纠正的方式提高精度,最终整体精度可达0.5米。
MMS生产的最终成果采用SQLServer数据的方式存储,数据库的结构可由用户自行定义,SQLServer数据库是一种通用格式,可以被绝大多数GIS、MIS系统所支持。
5.售后承诺
我们的售后服务包括:
提供完整的使用流程培训;
协助客户建立检校场
1年的产品质保期;
终身产品维护和技术支持服务。
6.销售情况
我们已出售超过40台套系统,主要客户为军方。
7.设备投入工程项目的应用情况案例介绍。
7.1数字城管系统
我们为全国50多个城市建设了基于实景影像数据的数字城管系统,该系统包含9大核心业务应用子系统和面向“大城管”的6大扩展子系统。系统部分核心功能包括广告牌管理、门前三包管理、违章建筑管理、目标街区管理等等。
下图是芜湖市数字城管系统的用户界面。

A) 户外广告管理
基于移动道路测量系统建立可视化的户外广告数据库,并与广告牌审核、执法等业务相结合,通过实景三维技术进行可视化的户外广告管理,实现城市户外广告的规范化、商业化、条理化、美观化。
B) 门前三包管理
基于移动测量系统技术在实景影像上对门前三包进行采集,建立可视化的城市门前三包管理数据库,实现可视化的门前三包责任区域管理。
C) 违章建筑管理
基于移动测量系统技术进行重点拆违区域房屋数据采集与建库,建立可视化的拆违区域房屋数据库。通过定期将实际现状和历史影像数据进行对比分析,形成执法依据,实现对重点拆违区域违章建筑的可视化管理。
D) 目标街区管理
基于一张整体的街景影像图管理,实现对道路两侧影像卷轴式的浏览和交互、对目标街区的专题内容迅速定位、快速查找,达到视觉的连续移动。使用这一功能可快速对目标街区进行浏览、查询和分析。

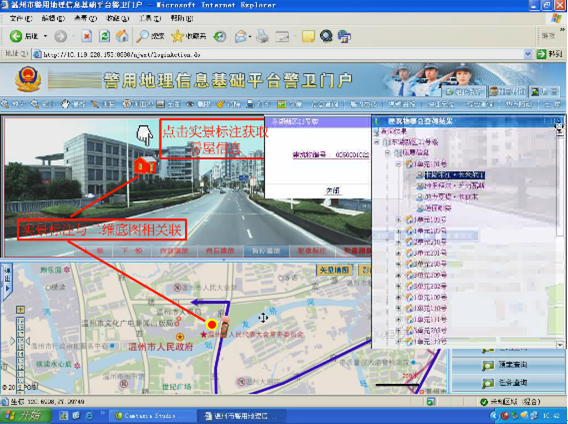
7.2实景三维警用地理信息系统
公安提供一套无缝覆盖整个城市的可量测实景影像库(DMI:Digital Measurable Image),它可以和二维地图、航测遥感影像精确配准使用,构成实景影像地图。在影像地图上可以准确地描绘现场的关键点、距离,从而让使用者如同亲临现场,有助于更好地分析事件。他们能够在影像上测量基础设施。配合地理信息数据,他们还能够在影像上深入观察战略要点、准入区域、疏散路线等,从而能够帮助他们制定更详细的战术计划和行动。
下图是我们使用MMS为温州市公安局建设的实景三维警用地理信息基础平台。
实景三维警用地理信息系统(VP-GIS)VP-GIS与传统二维P-GIS的比较
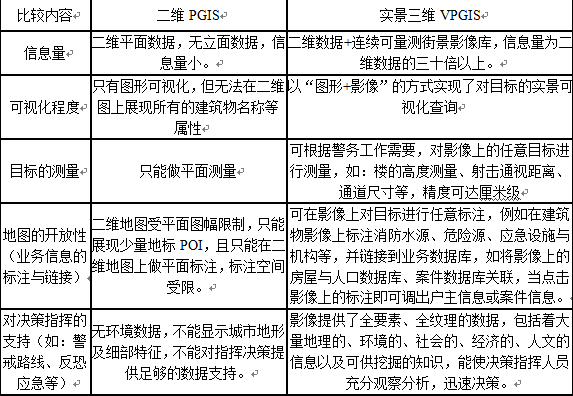











{{item.content}}