
近日,清华大学车辆与运载学院李骏院士团队发布了国际首个面向中国城市复杂气候环境的自动驾驶4D成像毫米波雷达数据集Dual Radar并免费开源,为复杂气候下的4D毫米波感知算法研究提供了一个新的测试基准。该数据集首次同时采集两种主流类型的4D雷达,可用于探索在不同雷达点云密度和噪声水平下的感知算法。
Dual Radar数据集采集车装备了相机、激光雷达和德国大陆ARS548 RDI及以色列Arbe Phoenix两种主流的4D毫米波雷达传感器,在国内城市复杂交通环境中多种气候(晴天、阴天、雨天等)和光照条件下(强光、弱光、逆光等)同时采集了图像、激光点云和两种4D毫米波点云多模态数据。采集总里程超过600公里,标注的数据由151个连续序列组成,每个序列持续20秒,包含10007个同步和注释的关键帧,标注了103272个的三维目标。数据集可用于自动驾驶感知算法研究,包括复杂场景下的三维目标检测和跟踪,并可用于探索4D毫米波雷达在自动驾驶感知中的应用。

Dual Radar数据集采集车
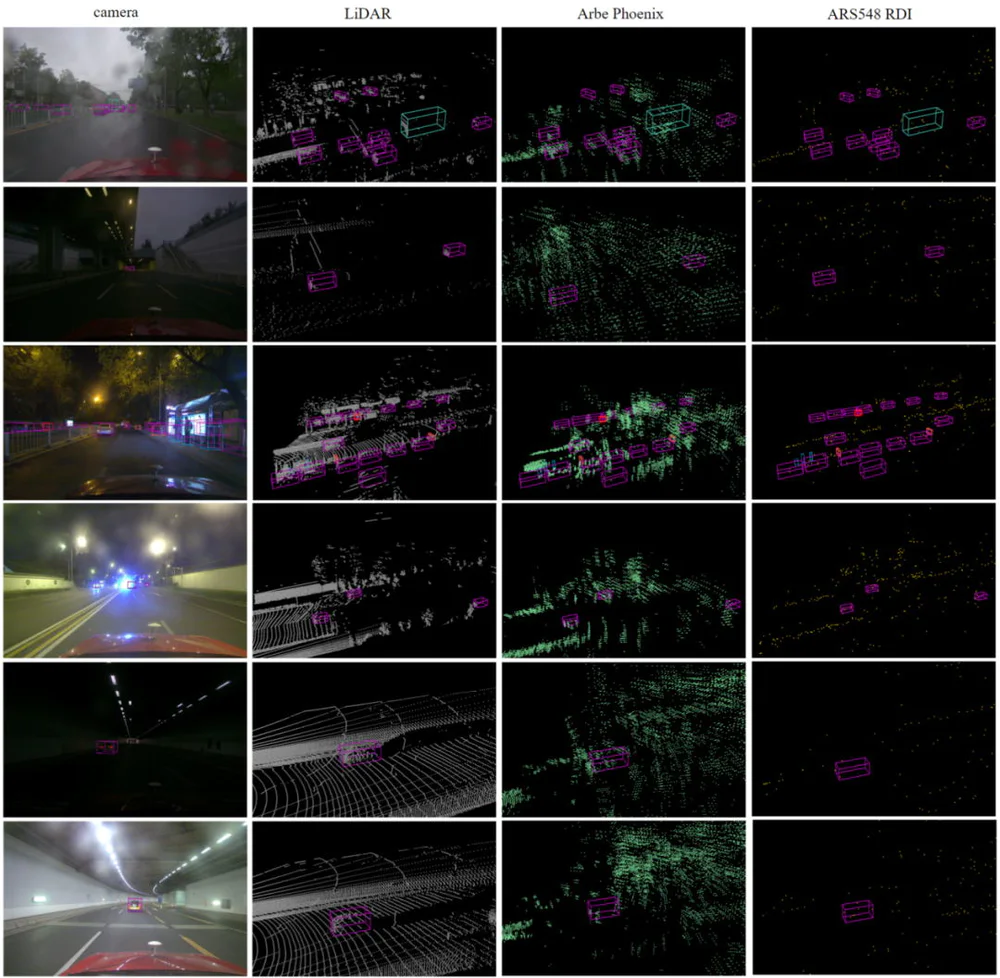
Dual Radar数据集典型场景及数据可视化(雨天、夜晚及隧道场景等)











{{item.content}}