
 泰伯网企服小助手
泰伯网企服小助手近期,觉非科技通过在车端与路端的大规模数据积累,基于MapTR(Map TRansformer)方法提出了创新与优化:①对车道信息的表达方式进行优化,并简化了模型结构;②在MapTR的基础上加入了地图先验信息,有效提升模型输出地图元素的准确度与召回率;③加入车道中心线以及道路拓扑等要素的建模,系统化提升单车实时建图效率,易于自动驾驶规控使用。
2022年,华中科技大学Vision Lab与地平线合作,共同提出了矢量高精地图在线实时构建方法MapTR。其对地图要素进行结构化建模,将地图元素表征为一组等效排列的点集,消除表示上的歧义性,降低模型的学习难度。同时,采用分层查询向量来编码地图结构化信息,可对点信息和实例级信息进行灵活编码。
实验表明,MapTR在nuScenes数据集上取得了较好的建图质量和实时运行速度,且在多样而复杂的驾驶场景中也能保持稳定的建图性能。MapTR展现了在线建图方案的潜力和前景,具有很高的应用价值。

优化方向:更适合自动驾驶下游任务使用
实时建图能力是实现自动驾驶实时环境感知的前提。目前,地图矢量化方法已成为实时建图的热点方向,其使用有序点集来表征各个地图元素,直接回归出每个地图元素的点集,实现了更准确的结果和更快的运行速度。
然而,在实际应用中,此类方法也出现了亟待提升之处。例如,检测多道路信息时,模型结构冗余,导致计算效率下降;对于遮挡与远处目标,无法提取有效特征。同时,该方法不能直接输出车道级的拓扑结构,导致下游规控模块难以使用。
针对以上问题,觉非科技通过大量的车端与路端数据积累,对MapTR方法进行实用性优化,通过这些优化更准确的捕捉地图细节和结构,从建图层面进一步丰富了地图要素的输出,使其更适合自动驾驶各种下游任务使用。
觉非科技的实践
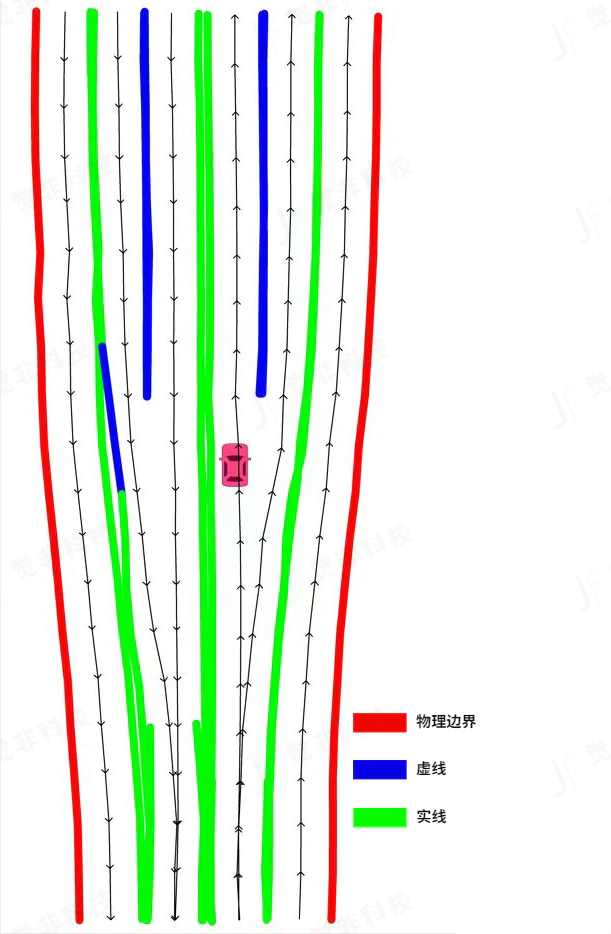
完善的车道属性表达方式
在MapTR的基础上,觉非科技增加了车道中心线的表达与输出,这样的方式可以更加清晰的反映出车道的连接关系。与此同时,觉非还增加了车道方向学习的能力,通过车道中心线的方向信息与对向车道的方向加以区分。不仅如此,模型还可以回归车道宽度信息以及车道边界线属性信息,这样的表达方式更加符合下游规控模块的真实需求,极大提升了自车对于地图理解的性能。
加入地图先验信息
通过大量的路测数据积累,觉非科技在MapTR中增加了地图先验信息,特别是在“路口”或存在遮挡关系的场景下,该方法可以更加稳定的输出拓扑连接关系,极大提升了准确度和召回率,进而提高自车在经过复杂路口等场景时的安全性。
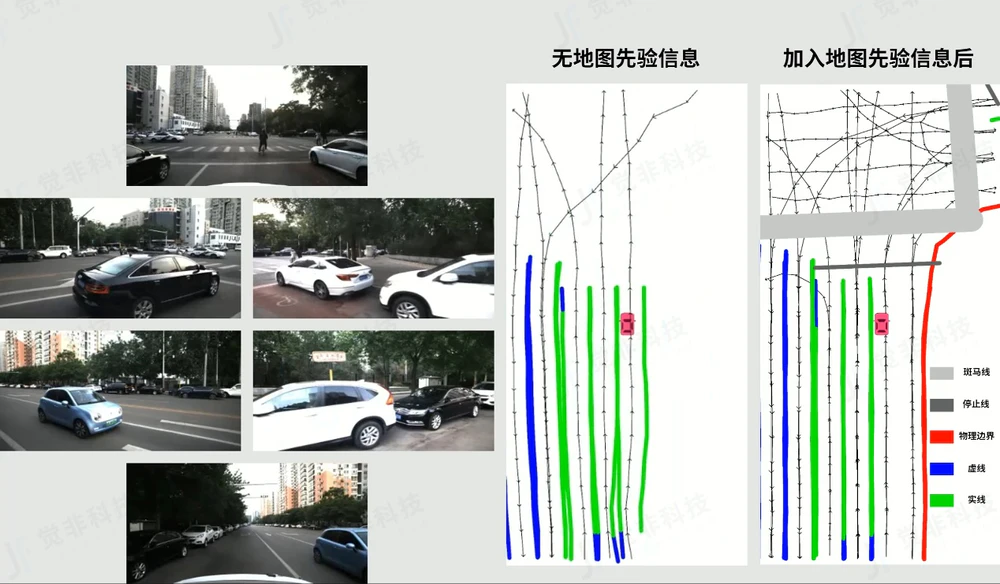 图:加入地图先验信息前后对比
图:加入地图先验信息前后对比
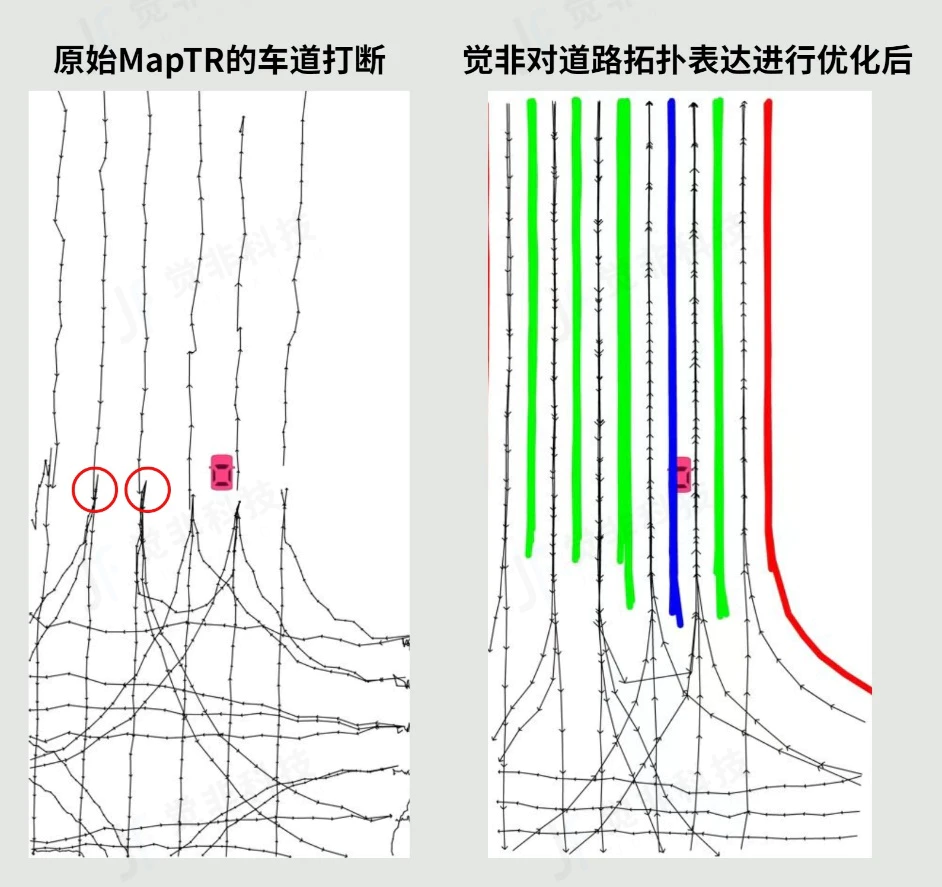
对于道路拓扑表达形式的优化
MapTR检测的车道对象通常会被拓扑分歧点打断,觉非科技的方案可以把被分歧点打断的车道重新挂接,无需后续手动处理车道挂接。这样的方式虽然会导致检出车道的部分重复,但可以使每个车道更加独立,车道形状更加连续与平滑,特别是在车道分叉频繁的场景下,可以为模型提供更明确的监督信号,提升整体模型在实际场景中使用的稳定性。
目前,觉非科技正在将基于MapTR的多重改进加入到多任务联合训练中,结合对障碍物3D检测、道路分割等能力,持续迭代感知大模型,赋予车辆在陌生场景下更好的自动驾驶能力。觉非科技希望通过这样的方式能够为实时建图的进一步创新提供基础,最终提升自动驾驶技术向更加安全可靠的方向发展。
论文原文链接:https://arxiv.org/abs/2208.14437
代码链接:https://github.com/hustvl/MapTR









{{item.content}}