
 泰伯网企服小助手
泰伯网企服小助手继“城市NOA:BEV数据闭环融合智驾解决方案”后,近日,觉非科技再次发布了“高速NOA地图定位量产解决方案”。该方案的发布,将数据闭环系统与影子模式延展至高速场景,让“重感知、轻地图”实现了在城市与高速的全场景覆盖。
方案解析
在已落地的高速NOA中,除特斯拉以外,各家的方案基本都高度依赖高精地图。相比普通的导航地图,高精地图的定位精度可达到厘米级别,并且可以提供道路形状、道路标记、交通标志和障碍物等信息。
行业目前普遍采用的是重地图的PnC架构,也就是根据图商提供的高精地图进行感知匹配与RTK定位。但这样的方案依旧面临许多挑战,例如由于高精地图鲜度或更新速度缓慢,在某些复杂场景下,地图精度及数据更新等问题难以支撑自动驾驶的要求,导致接管率居高不下。
面对这样的挑战,觉非科技认为,城市NOA“重感知、轻地图”的应用模式可复用于高速NOA,通过轻图或众源地图实现车道级定位,可与重感知方案形成有效互补,有助于提升高速NOA整体的驾驶体验与安全性。
觉非科技的“高速NOA地图定位量产解决方案” 可通过车机导航地图或众源地图实现,结合量产车实时感知结果,满足车辆在高速场景下的高精定位需求。
觉非科技将“高速NOA地图定位量产解决方案”分为两个版本。

1. 融合定位Air方案
该方案基于“图商车机导航地图”实现,可通过更加轻量级的地图数据接入方式实现高精定位。方案应用中,觉非科技将车机导航地图数据与感知数据进行匹配,同时结合GNSS定位,替代传统L2+ PnC架构下的重地图方式,为车辆提供车道约束与相对定位。
2. 地图定位Live方案
觉非科技同时提供基于“众源地图Live服务”的建图定位方案。该方案基于众源地图Live服务可进行规格定制,进而再与车辆感知进行匹配,结合GNSS位置,为车辆提供并线和进出匝道时机判断。同时基于自车感知数据可进行数据的实时更新,与众源地图Live服务形成闭环。在Live模式下,车辆可以在“鲜度”更高的数据模式下,具备更加精准的定位能力,有效降低因地图数据错误导致的NoA降级或接管。
在Air版本和Live版本的方案搭建中,觉非科技将高速公路车辆前向感知与L2 SOC芯片及GNSS/IMU卫导与惯导进行搭载,结合众源地图服务实现。
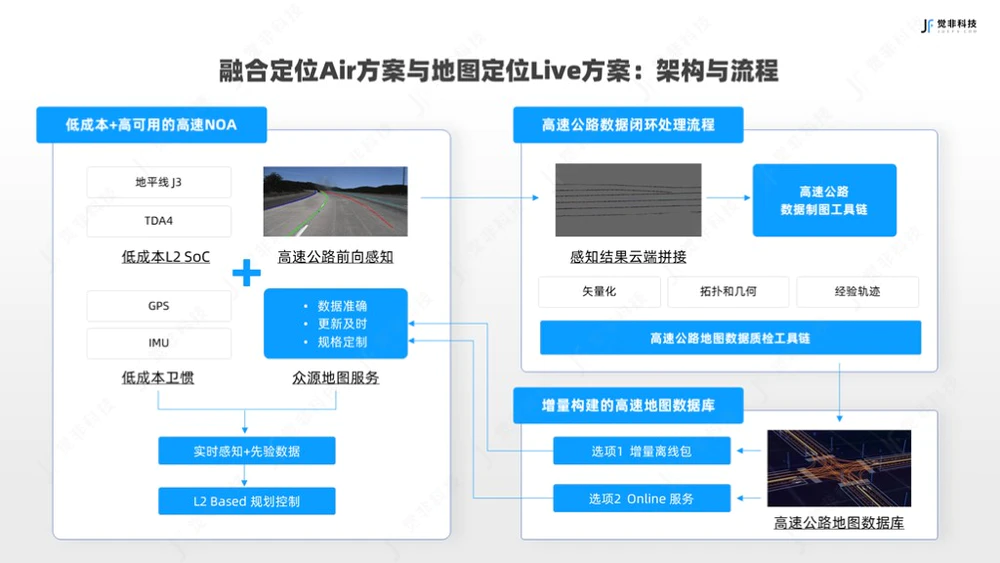
觉非科技同时搭建了针对高速NOA的数据闭环处理流程,将车端感知结果进行数据拼接,通过高速公路数据制图工具链与数据质检后生成增量化的高速辅助驾驶地图数据库。
数据可以通过“增量离线包”或“Online服务”的方式下发给车辆,让车辆的感知数据在鲜度更高、数据准确的环境下运行,整体方案已可应用于L2自动驾驶规控系统,可大幅降低高速场景下的接管次数。
整套“高速NOA地图定位量产解决方案”,其背后对应的是觉非感知大模型的搭建与应用能力。

觉非科技的感知大模型通过规模化数据采集,生成冷启动模型,而后通过量产化制图能力产生地图数据库,结合觉非自研的数据中心实现快速不断的迭代,并生成算法训练数据库,进而实现向大模型的正向循环。
与此同时,未来觉非科技将形成感知智能和认知智能的双维大幅提升,基于感知大模型的不断迭代,将数据驱动的算法应用于更多量产项目,实现感知大模型在城市与高速场景的全面落地。









{{item.content}}