
泰瑞数创PhotoMesh7.8新版本空三分布式算法更完善更可靠,百万级任务工程可实现一键式处理提交、自动化分区融合,使大范围海量数据的城市级实景三维建设比以往任何时候都更加简单。在面对几百平方公里甚至几千平方公里的城市级建模任务时,相较传统工艺,任务周期缩短80%以上。
PhotoMesh7.8还针对多源数据融合处理、协同标定和智能工作流等技术难点做了重点突破,完成了从界面到功能到性能的全方位升级,包括近景摄影建模质量优化,LIDAR融合效果优化,自动化流程优化(如计算资源池、项目队列以及云计算实例自定义)等。
新产品优势
高效能低成本
对于生产企业而言,如何在实景三维建设过程中实现高效能低成本是必须考虑的首要因素。对此,PhotoMesh7.8可以大大减少成本支出并有力的提高人效比。在计算环境搭建过程,其硬件普适性适配的特点可完美兼容高中低端设备,保障产品在不同环境下正常运行,并针对高性能服务器或工作站,采用“FuserFarm”机制实现“一机多开”,充分利用计算资源,保持效率与计算性能的线性增长。新产品同时采用“FuserPool”机制实现了计算资源快速池化,实现一次配置,永久使用,动态分配。
在建模过程中,PhotoMesh7.8只需要少量控制点就能获得高精度的成果,较常规像控布设方式减少50%以上布点量;在控制点布设较为困难区域,可通过临近区域工程进行约束从而无缝对接;在数据更新频繁区域,可通过历史工程实现一次刺点重复使用。
海量数据快速处理
城市级实景三维模型重建的挑战来源于多个方面,包括但不限于:
1)覆盖面积大导致原始数据量大
2)采集周期长导致数据质量不一
3)控制点多导致刺点工作量大
4)空三计算瓶颈导致工程数量多
5)计算性能有上限导致增加节点不增加效率
6)大量计算节点同时读写导致网络堵塞
7)阶段性自动化造成时间浪费等
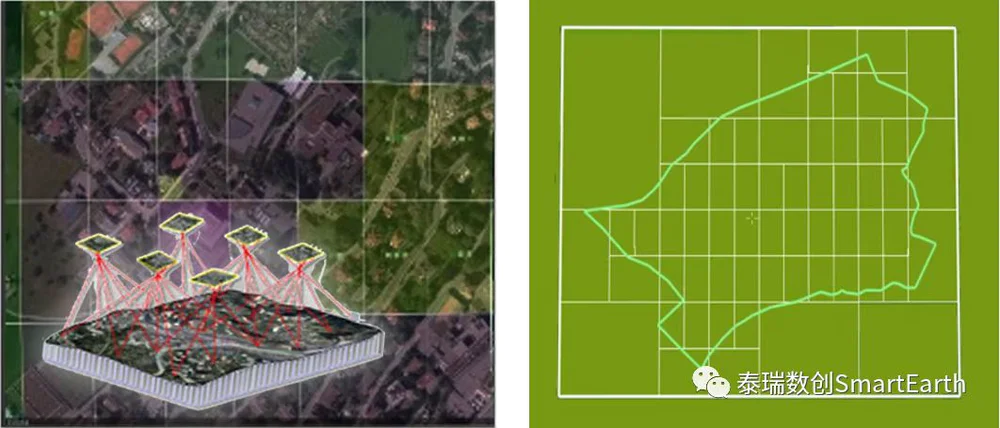
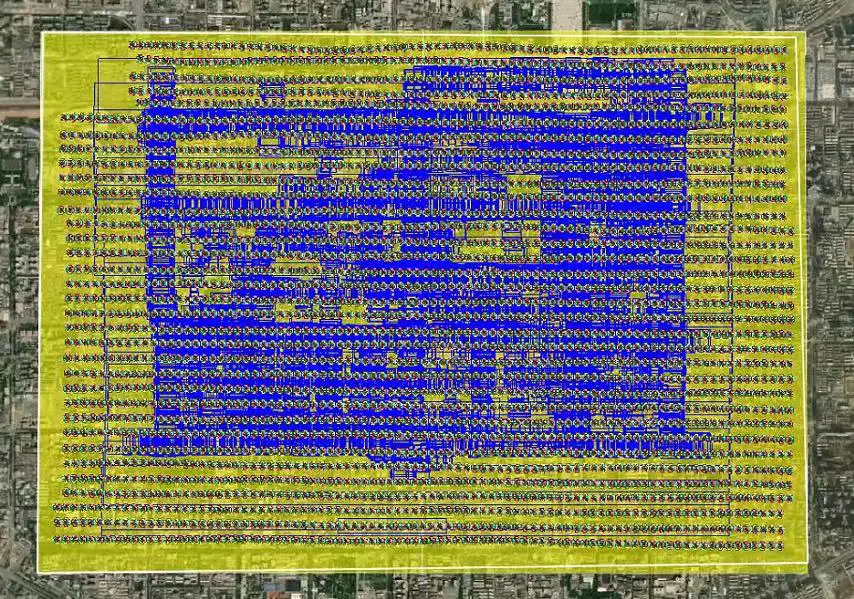
空三分布式计算
对于PhotoMesh7.8来说,其特有的空三分布式机制,不仅有效解决了当前空三计算存在的瓶颈问题,实现了无限数据承载量,一次性加载并计算百万张影像,减少了工程数量及重复刺点工作;而且其稳定的空三计算能力可以确保数据质量不一时空三计算的成功率。其基于资源池的计算节点自动缩放机制和科学的实时任务分配机制可确保上千节点高效运行而不造成网络拥堵。其全流程自动化建模能力可确保空三和建模无缝衔接。
多源数据融合一体化
在城市级实景三维建设过程中,城市中心、标志性建筑、重点位置、建筑密度较大区域等,为了获得更好的建模效果均需要采取多种技术手段进行数据获取,常见的有激光点云、街景影像、视频、相片等。对于以上数据,PhotoMesh7.8均可以与航拍影像进行融合重建,从而得到精细化程度更高的模型成果。
航空影像+航空点云+地面点云

建模效果
高自动化/可视化质量控制
在大规模集群计算过程中,流程全自动化是刚需的一个指标。PhotoMesh7.8内置了包含重建全流程的参数模板,可一键提交全流程建模,也可自定义重建过程。
除此之外,对于不同的项目,PhotoMesh7.8适配了不同的预设参数,通过预设参数可以解决特殊地区(如沙漠、冰川、湖泊等)实景三维重建匹配点不足导致的重建失败问题。

成果的精度及效果作为实景三维建设的重要部分,应达到高标准严要求的原则。PhotoMesh7.8提供了一系列可视化的质量控制功能,涵盖了输入、处理和输出整个完整闭环,让所有操作、步骤、成果均可查可看可量测,以三维可视、标签及图表的形式实现了全流程的质量监测和控制。

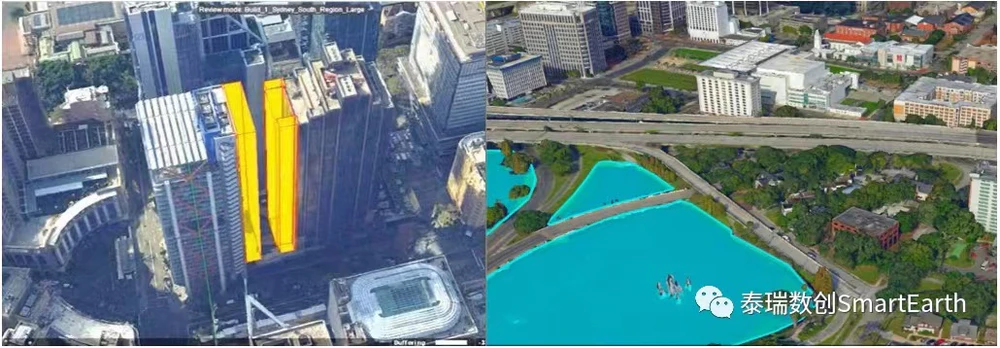
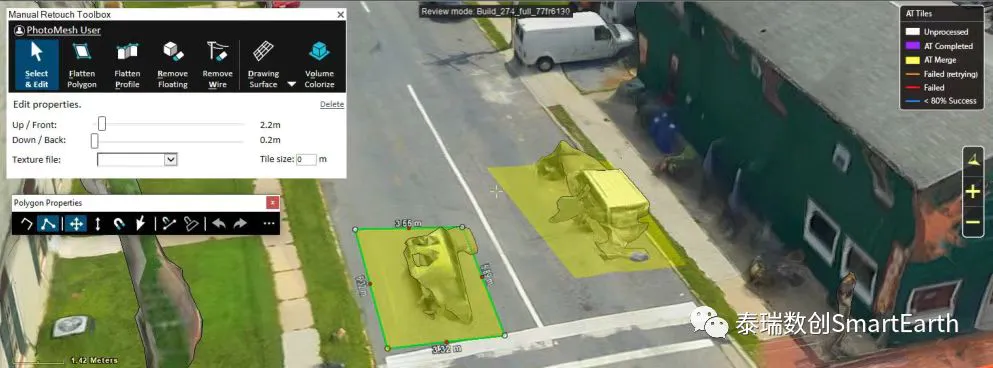
重建与修饰一体化
目前,实景三维重建的精细化程度及可视化效果要求越来越高,重建模型成果的修饰是不可避免的。PhotoMesh7.8提供了地物表面置平、黏连结构约束、水体修复、悬浮去除、水面及植被纹理替换等修饰功能,可以直接对实景三维场景进行简单编辑,简化了现有模型编辑流程,避免第三方工具兼容问题。
二三维高精度成果
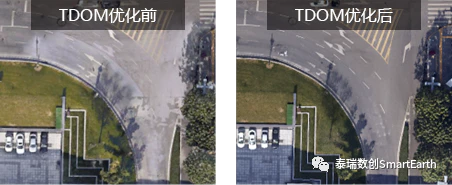
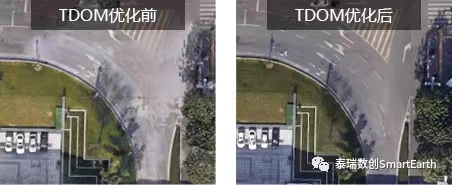
对于实景三维建设,《通知》中明确规定,坚持“只测一次,多级复用”的原则,在高精度实景三维数据覆盖区域,只基于已有成果整合、不重复生产,在非覆盖区域进行新测生产。PhotoMesh7.8基于一次航飞成果可同时生产五种高精度成果,包括实景三维模型,点云,DSM,DTM和TDOM。实景三维多元化成果的输出避免了重复测绘,使数据价值最大化,满足多种应用需求。而且PhotoMesh7.8的金字塔LOD优化策略能很好的保证大场景实景三维模型的浏览效率,可实现上千平方公里模型的秒级流畅刷新。

PhotoMesh7.8生产的TDOM质量尤其出色,基于算法层面的先进性,可输出更干净、更高质量的TDOM成果,有效避免影像透视,纹理拉花,斑驳错位等问题。
与地形三维完美融合
实景三维建设的成果因组成一个有机整体,即地形级、城市级和部件级能完美融合,从而满足真实、立体、时序化反映人类生产、生活和生态空间的时空信息的要求。PhotoMesh7.8可输出具有流优化的,高精度的3DML(三维网格模型图层数据库)成果,3DML具备原生高程信息,可以转换为强大的地理空间数据格式,并与实景三维地形完美融合。
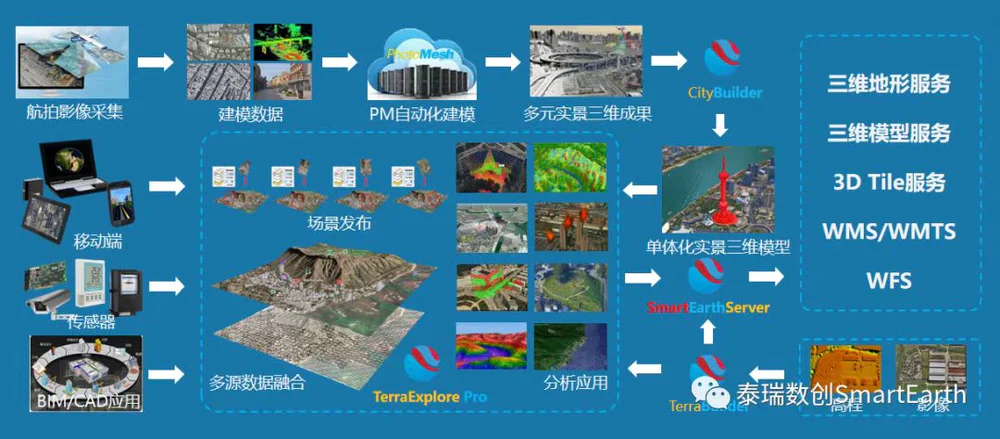
数据到行业应用无缝支撑
PhotoMesh7.8是业内唯一一款具有全产业链模型处理能力的产品,提供模型生产、逻辑单体化处理、模型展示、模型应用、模型发布等一体化解决方案,实现桌面端、Web端及移动端一体化应用。
产品新功能
▲贴近摄影测量适配
☆优化⾼分辨率、贴近摄影测量匹配算法
☆空三优化:支持如塔和天线等近距离对象的数据集
☆AI赋能:自动识别和去除天空背景
☆重建优化:更好地锐化和构建细小元素,提升重建效果,如杆和管道

优化成果质量
▲三角网优化:减少平滑区域三角网数量,增强复杂结构三角网数量
▲纹理优化:新增色彩均衡预设参数,自动匀光匀色
▲优化低重叠度建模效果
▲优化金字塔生成算法,提⾼不同层级⾦字塔显示效果
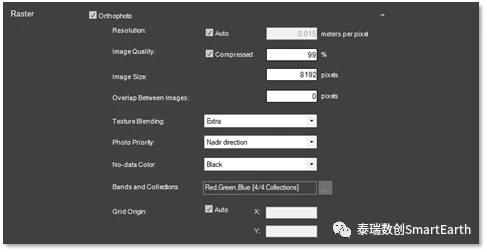
▲自定义TDOM/DSM分幅尺寸、分幅重叠,优化TDOM质量

新增瓦块状态定义功能
新增瓦块状态定义功能,支持使用一组彩色标签检查和标记空三和建模瓦块,并添加文本注释。支持通过状态标签对瓦块进行排序和筛选,以便执行重建、手动修饰、导出等操作。

新增模型修饰工具
▲原生模型修饰工具直接对问题区域进行压平、填充和去悬浮等操作。

新增参考项目功能约束临近区域
▲可参考邻近项目的空三结果自动对新项目进行地理参考匹配,确保临近项目精度效果一致。
拓展输入/输出支持
▲输入:支持导入使用yaw/pitch/roll来进行定向表达的影像
▲输出:支持DSM导出为LAS或LAZ格式的彩色点云模型

▲输出:空三和建模瓦片范围可以作为项目输出的一部分进行保存
▲输出:栅格影像成果(包括TDOM、DSM和DTM)均使用LZW无损压缩保存为未压缩的TIFF。
改善LIDAR融合建模
▲增强点云数据的显示和融合能力
▲点云数据可以与项目影像融合,以补充项目数据并提高模型精度
▲点云样式-基于点云属性信息设置点大小、颜色和可见性;
▲在可排序的多重编辑列表中管理激光雷达源。在三维窗口中显示激光雷达的轨迹。

可定制自动化流程
▲FusersPool机制:私有云/集群资源节点快速池化
▲AWS适配:亚马逊云实例自动化调用
▲任务队列API:创建、监视、处理和管理项目全流程监控
增强易用性
▲新增拖放功能
▲新增列表选择和全局选择模式
▲改进对象列表
▲改进选择工具
▲支持用户自定义瓦块状态
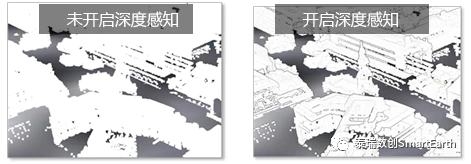
▲新增点云深度感知模式
▲新增数据预处理、空三、建模的参数预设,辅助生成高质量成果
▲新增空三/建模区域准确绘制及缓冲区设置功能
▲近距离导航:改进了3D导航以⽀持近距离和垂直对象
▲相对路径:支持将项⽬复制或移动到新⽂件夹或驱动器位置,并且可以从新位置的任何步骤恢复









{{item.content}}