
数字式景象匹配相关制导,是利用弹上设施实时拍摄导目标区景物的图像,经过数字化转换,与预先存储的数字式参照图像进行比较,来确定导弹相对于目标位置的制导方式,全称为数字式景象匹配区域相关制导。多用于远程巡航导弹的末制导。
实现这种制导须预先在目标附近选择地貌特征明显的地区作为景象匹配区,通过侦察获得匹配区景象的光学图像,并把景象匹配区分成若干个正方形小单元,根据每个单元的平均光强度换算成相应的数值,构成反映景象匹配区各单元光线强度、灰度等级的数字式景象图像,存在导弹的计算中,规划任务时由计算机模拟确定航向及导弹飞行的纵向、横向制导误差,对预定航线下的某些确定景象都准备一个基准地图,其横向尺寸要能接纳制导误差加上导弹运动的容限。

“战斧”巡航导弹
数字式景象匹配制导系统主要由计算机、相关处理机以及传感器等部分组成。
传感器通常为电视摄像机,它主要由成像阵列和图像增强器等组成。当导弹飞过景象匹配区时,导弹上的电视摄像机拍摄的景物图像经过数字化处理,形成遥感实时图像,与存储的数字景象地图进行对比。制导系统经过串行数据总线发出迷散指令,控制其工作周期,确定导弹是否偏离预定航线。如果发生偏离,则产生修正导弹航线误差的控制信号。
通常将预存于匹配系统中的图像信息称为基准图, 而将系统工作时实时获取的图像称为实时图。基准图的质量是决定景象匹配精度的重要因素之一。在基准图的制备过程中,按照一定的要求或准则选取特征明显、信息量大、可匹配性高的数字地图作为制导基准图至关重要。
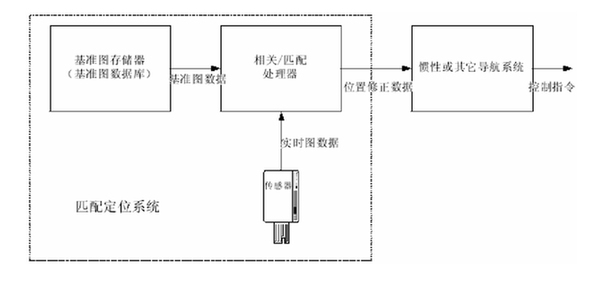
景象匹配系统工作原理示意图
景象匹配就是要找到实时图在基准图中的位置,目前的各种匹配算法,依据参与匹配运算的数据结构的不同,可以分为基于区域的匹配算法(Area-based algorithms)和基于特征的匹配算法(Feature-based algorithms)两大类。环境对于末段景象匹配的影响是很大的,如景物的反射率和辐射率的变化、云和太阳投射角的变化所引起的阴影和景物的遮挡效应以及在基准区域中实际景物的变化等。所有这些因素都将引起景象匹配实时图全部或部分网格的灰度值变化,从而影响匹配结果。人为的干扰会对景象匹配的效果产生更大的影响。在科索沃战争中,南联盟就曾利用燃烧废旧轮胎的办法对敌方的巡航导弹进行干扰,使其末段数字景象匹配系统丧失作用。
数字式景象匹配制导用作远程巡航导弹的末制导,可大大提高导弹的命中精度。例如美国BGM-109C/D常规对地攻击型“战斧”巡航导弹,采用惯性+地形匹配+数字式景象匹配区域相关制导,圆概率误差约为9米,改进型接近6米。如果只有前两种制导方式,圆概率误差为30米。(来源|科普中国)










{{item.content}}